比较两张图片的时候,如何比较关键点距离以便忽略那些明显不正确的匹配?我发现当相似图片相互比较时,大多数情况下可以相当准确,但有时会出现完全不同的匹配。因此,我需要一种方法来查看两张图片中的两组关键点,并确定匹配的关键点是否在两张图片上相对位置相同。也就是说,它知道图像1上的关键点1、2和3相距很远,因此在图像2上匹配的相应关键点应该相互之间距离相当接近。我过去使用了RANSAC和最小距离检查,但只有一定效果,它们似乎没有我想要的彻底性。(使用ORB和BruteForce)
编辑:将“x、y和z”更改为“1、2和3”
编辑2 - 我将尝试用快速绘制的示例进一步解释:
假设这是我的图像:
(图片无法翻译,请见谅)
并且我给它这个图片进行比较:
(图片无法翻译,请见谅)
这是原始图片的裁剪和压缩版本,但显然相似。
现在,假设你运行它通过特征检测,并为两个图像返回以下结果的关键点:
(图片无法翻译,请见谅)
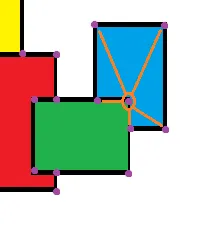
两张图片上的关键点大致在相同的区域,比例上距离相互之间相等。取我圈出的关键点,我们称其为“图像1关键点1”。
(图片无法翻译,请见谅)
我们可以看到它周围有5个关键点。我需要获取这些点与"图像1关键点1"之间的距离,以便将它们与同一区域内"图像2关键点1"及其周围的5个关键点进行比较(如下所示),从而不仅对一个关键点进行比较,而是根据关键点的位置比较已知形状。
编辑:将“x、y和z”更改为“1、2和3”
编辑2 - 我将尝试用快速绘制的示例进一步解释:
假设这是我的图像:
(图片无法翻译,请见谅)
并且我给它这个图片进行比较:
(图片无法翻译,请见谅)
这是原始图片的裁剪和压缩版本,但显然相似。
现在,假设你运行它通过特征检测,并为两个图像返回以下结果的关键点:
(图片无法翻译,请见谅)
两张图片上的关键点大致在相同的区域,比例上距离相互之间相等。取我圈出的关键点,我们称其为“图像1关键点1”。
(图片无法翻译,请见谅)
我们可以看到它周围有5个关键点。我需要获取这些点与"图像1关键点1"之间的距离,以便将它们与同一区域内"图像2关键点1"及其周围的5个关键点进行比较(如下所示),从而不仅对一个关键点进行比较,而是根据关键点的位置比较已知形状。
--
这样说清楚了吗?