我在处理中使用一个颜色跟踪代码。
我希望的效果(示例):
整个代码:
重要片段如下:
我希望的效果(示例):
- 如果检测到红色,则显示图像1
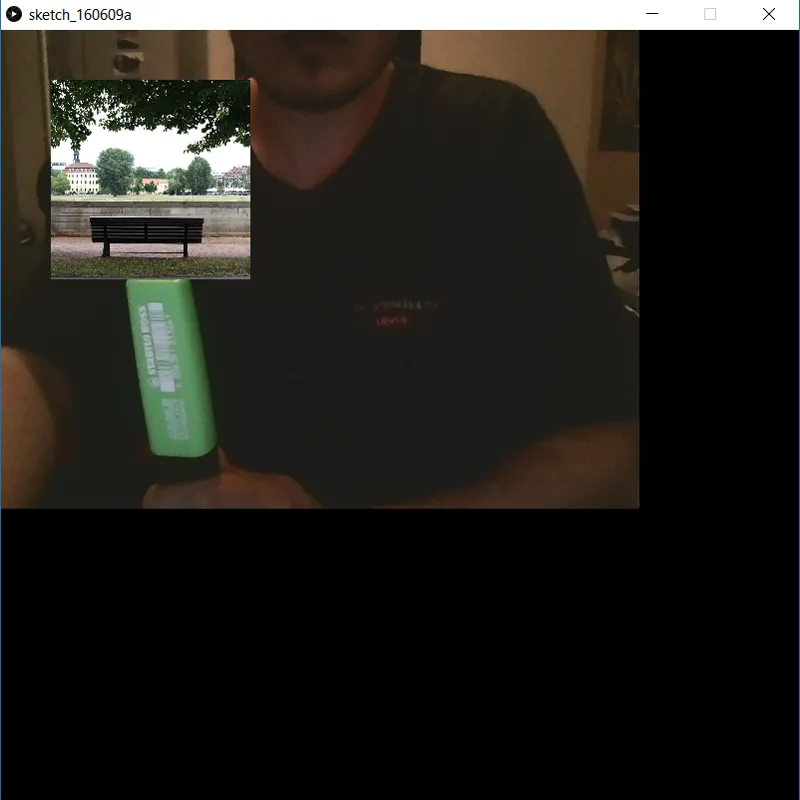
- 如果检测到绿色,则显示图像2
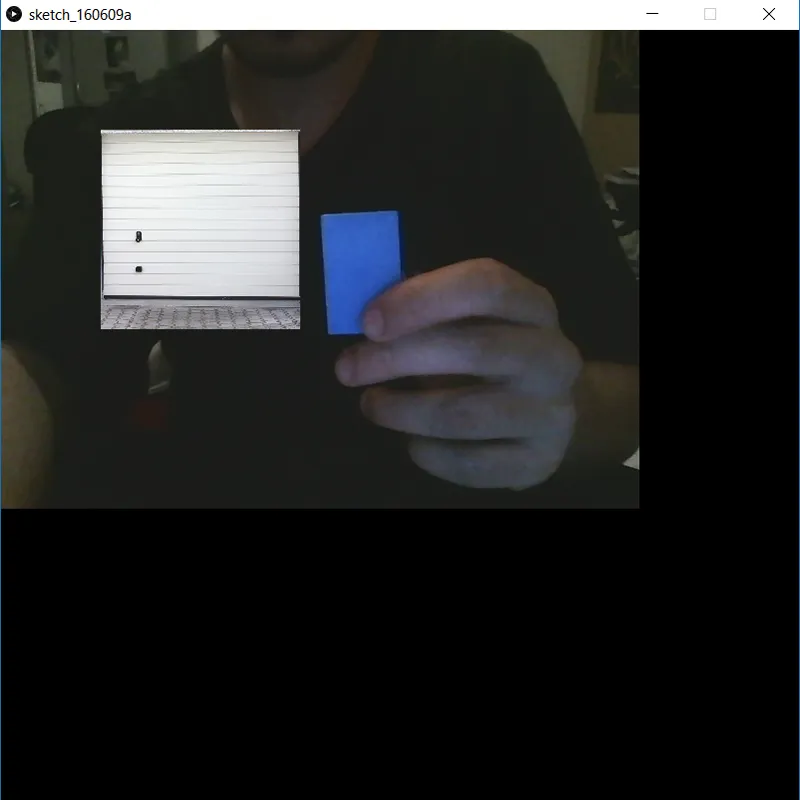
- 如果检测到蓝色,则显示图像3
整个代码:
import processing.video.*;
//import hypermedia.net.*;
PImage img;
PImage img2;
PImage img3;
Capture video;
final int TOLERANCE = 20;
float XRc = 0;// XY coordinate of the center of the first target
float YRc = 0;
float XRh = 0;// XY coordinate of the center of the second target
float YRh = 0;
float XRc2 = 0; // XY coordinate of the center of the third target
float YRc2 = 0;
float XRh2 = 0;// XY coordinate of the center of the fourth target
float YRh2 = 0;
int ii=0; //Mouse click counter
color trackColor; //The first color is the center of the robot
color trackColor2; //The second color is the head of the robot
color trackColor3; //The first color is the center of the robot 2
color trackColor4; //The first color is the center of the robot 2
void setup() {
img = loadImage("IMG_4700.JPG");
img2 = loadImage("2.JPG");
img3 = loadImage("3.JPG");
size(800,800);
video = new Capture(this,640,480);
video.start();
trackColor = color(94,164,126);
trackColor2 = color(60,110,194);
trackColor3 = color(197, 76,64);
trackColor4 = color(255,0,0);
smooth();
}
void draw() {
background(0);
if (video.available()) {
video.read();
}
video.loadPixels();
image(video,0,0);
float r2 = red(trackColor);
float g2 = green(trackColor);
float b2 = blue(trackColor);
float r3 = red(trackColor2);
float g3 = green(trackColor2);
float b3 = blue(trackColor2);
float r4 = red(trackColor3);
float g4 = green(trackColor3);
float b4 = blue(trackColor3);
float r5 = red(trackColor4);
float g5 = green(trackColor4);
float b5 = blue(trackColor4);
int somme_x = 0, somme_y = 0; // pour le calcul des baricentres
int compteur = 0;
int somme_x2 = 0, somme_y2 = 0; // pour le calcul des baricentres
int compteur2 = 0;
int somme_x3 = 0, somme_y3 = 0; // pour le calcul des baricentres
int compteur3 = 0;
int somme_x4 = 0, somme_y4 = 0; // pour le calcul des baricentres
int compteur4 = 0;
for(int x = 0; x < video.width; x++) {
for(int y = 0; y < video.height; y++) {
int currentLoc = x + y*video.width;
color currentColor = video.pixels[currentLoc];
float r1 = red(currentColor);
float g1 = green(currentColor);
float b1 = blue(currentColor);
if(dist(r1,g1,b1,r2,g2,b2) < TOLERANCE) {
somme_x += x;
somme_y += y;
compteur++;
}
else if(compteur > 0) {
XRc = somme_x / compteur;
YRc = somme_y / compteur;
}
if(dist(r1,g1,b1,r3,g3,b3) < TOLERANCE) {
somme_x2 += x;
somme_y2 += y;
compteur2++;
}
else if(compteur2 > 0) {
XRh = somme_x2 / compteur2;
YRh = somme_y2 / compteur2;
}
if(dist(r1,g1,b1,r4,g4,b4) < TOLERANCE) {
somme_x3 += x;
somme_y3 += y;
compteur3++;
}
else if(compteur3 > 0) {
XRc2 = somme_x3 / compteur3;
YRc2 = somme_y3 / compteur3;
}
if(dist(r1,g1,b1,r5,g5,b5) < TOLERANCE) {
somme_x4 += x;
somme_y4 += y;
compteur4++;
}
else if(compteur4 > 0) {
XRh2 = somme_x4 / compteur4;
YRh2 = somme_y4 / compteur4;
}
}
}
// track the color and show images
boolean c1 = false;
boolean c2 = false;
boolean c3 = false;
if(XRc != 0 || YRc != 0) { // color Green detected
c1 = true;
c2 = false;
c3 = false;
}
if(XRh != 0 || YRh != 0) { // color blue detected
c2 = true;
c1 = false;
c3 = false;
}
if(XRc2 != 0 || YRc2 != 0) { // color red detected
c3 = true;
c1 = false;
c2 = false;
}
if(c1 == true) {
image(img,0,0); // show image 1
} else if (c2 == true) {
image(img2,0,0); // show image 2
} else if (c3 == true) {
image(img3,0,0); // show image 3
}
}
重要片段如下:
// detect color and show images
boolean c1 = false;
boolean c2 = false;
boolean c3 = false;
if(XRc != 0 || YRc != 0) { // color Green detected
c1 = true;
c2 = false;
c3 = false;
}
if(XRh != 0 || YRh != 0) { // color blue detected
c2 = true;
c1 = false;
c3 = false;
}
if(XRc2 != 0 || YRc2 != 0) { // color red detected
c3 = true;
c1 = false;
c2 = false;
}
if(c1 == true) {
image(img,0,0); // show image 1
} else if (c2 == true) {
image(img2,0,0); // show image 2
} else if (c3 == true) {
image(img3,0,0); // show image 3
}
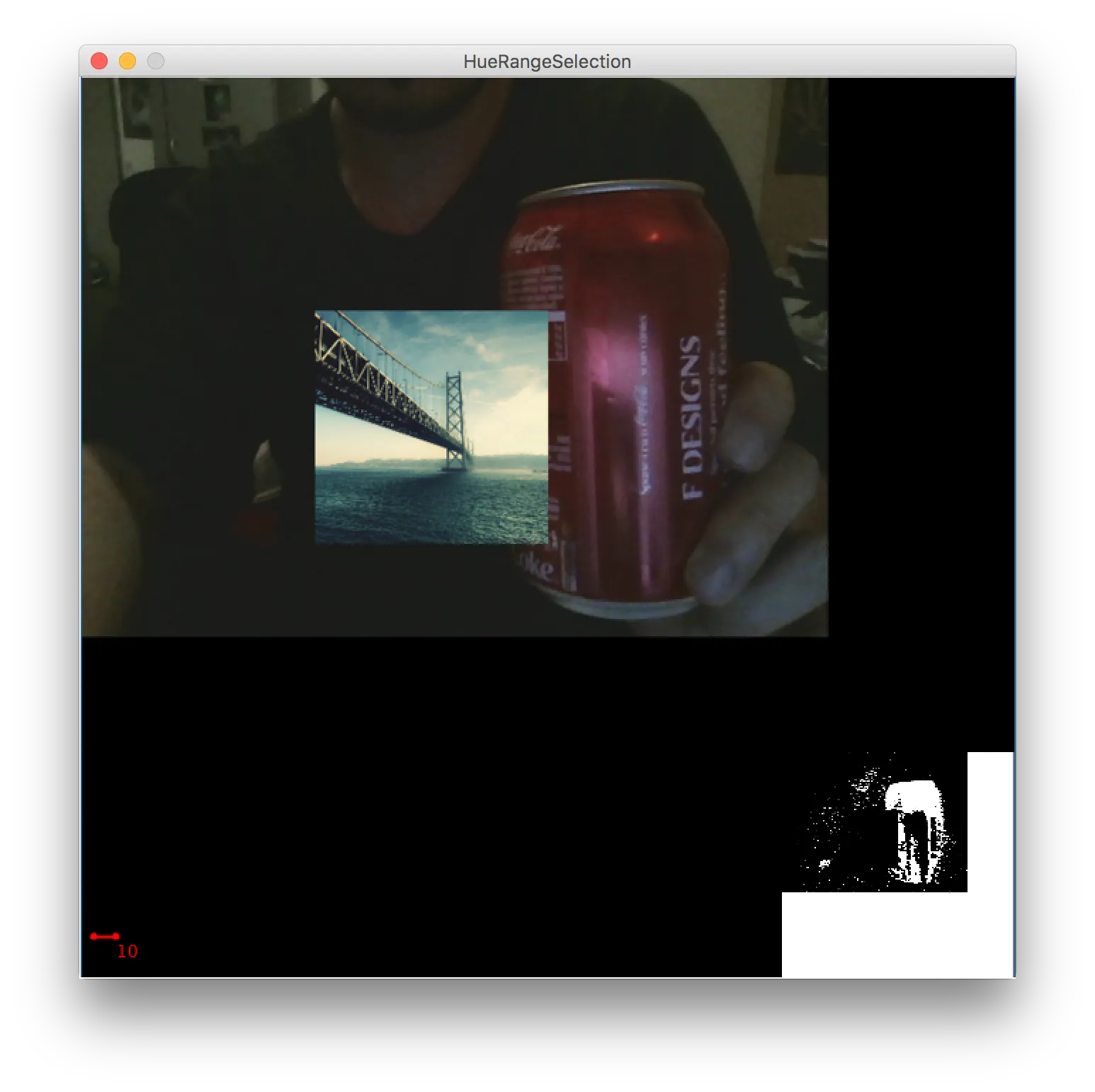
截图:
第一个物体被追踪并显示图像
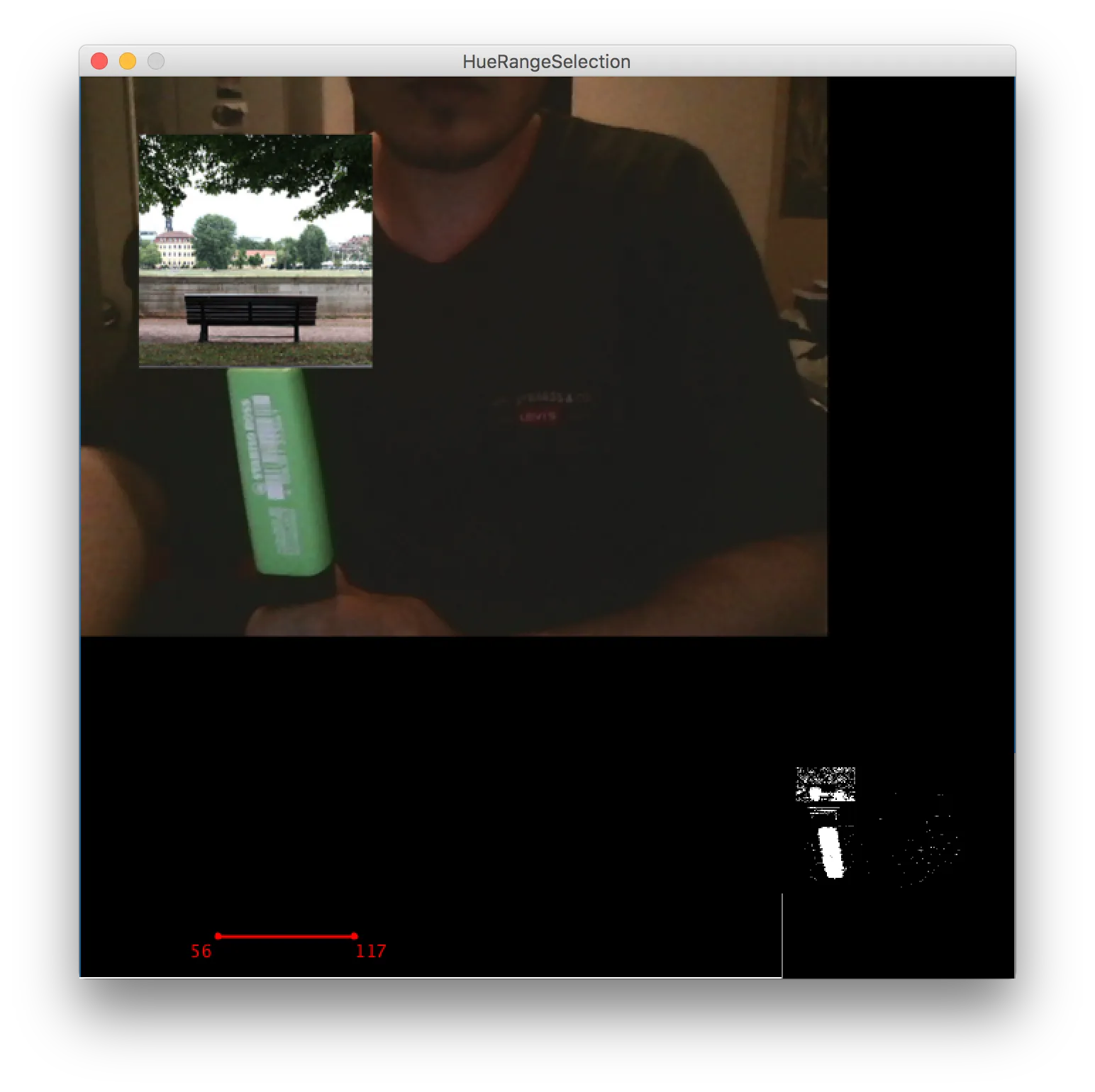
第二个物体被追踪并显示图像
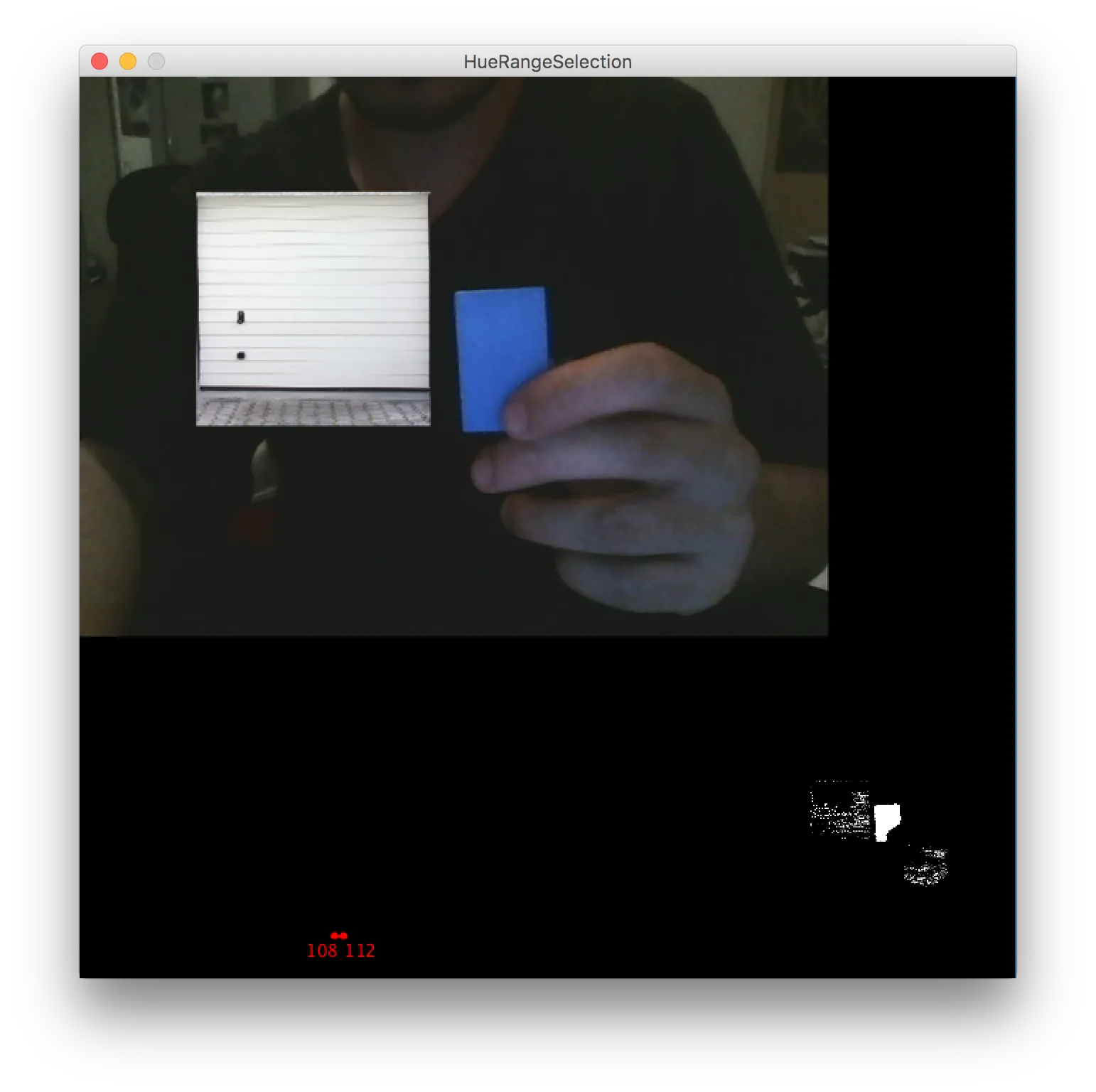
第三个物体被追踪并显示图像
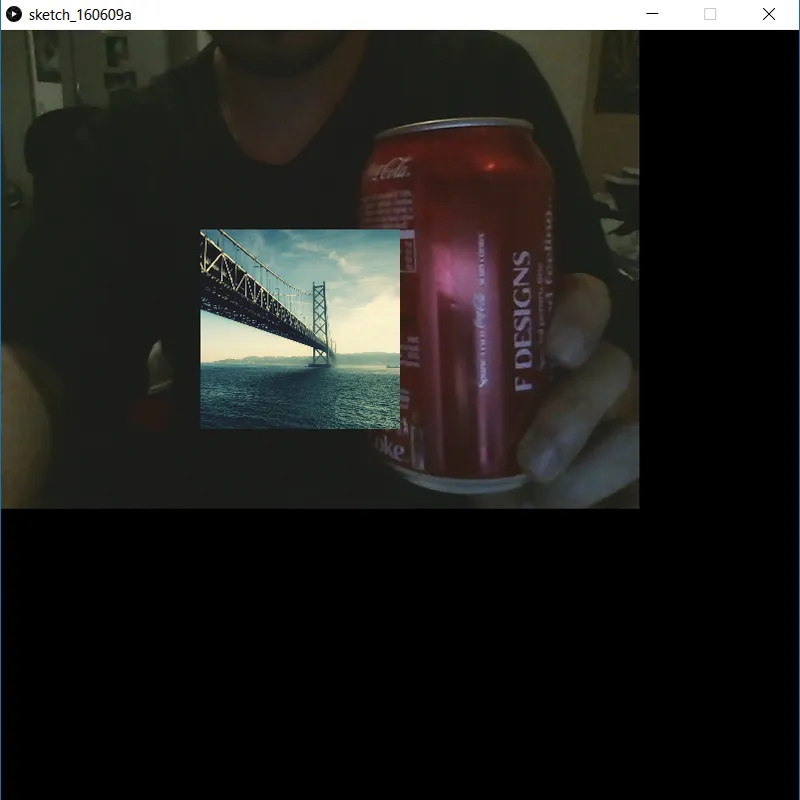
我的问题:
(应该追踪第一个物体并显示第一张图片)
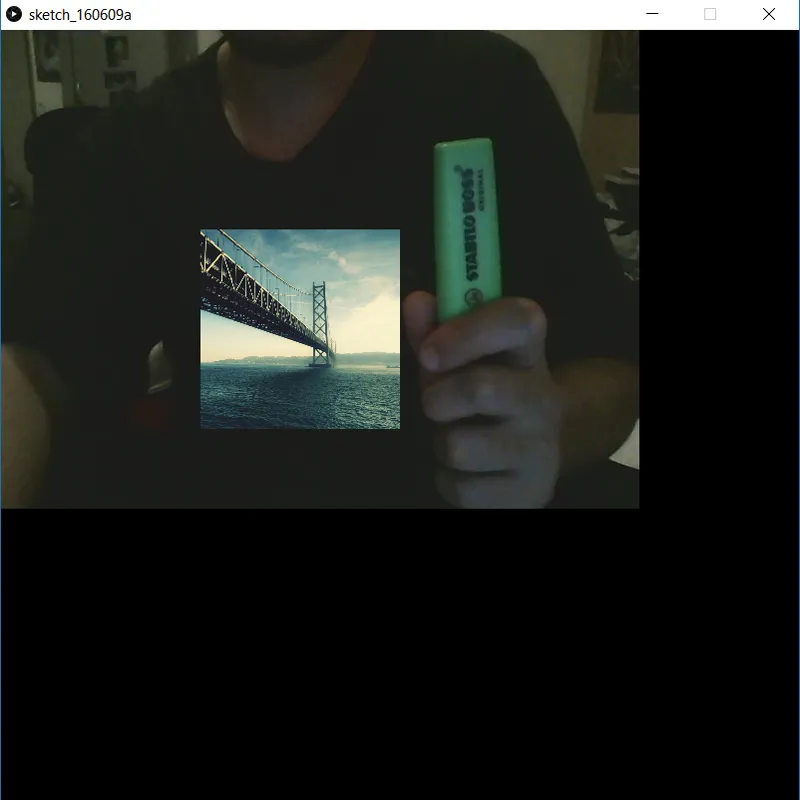
println()语句来确定到底哪些if语句被执行了,以及所有变量的值。这样可以告诉你代码在做什么,然后我们可以逆向思考为什么会这样。 - Kevin Workman