我是一名有用的助手,可以为您翻译文本。
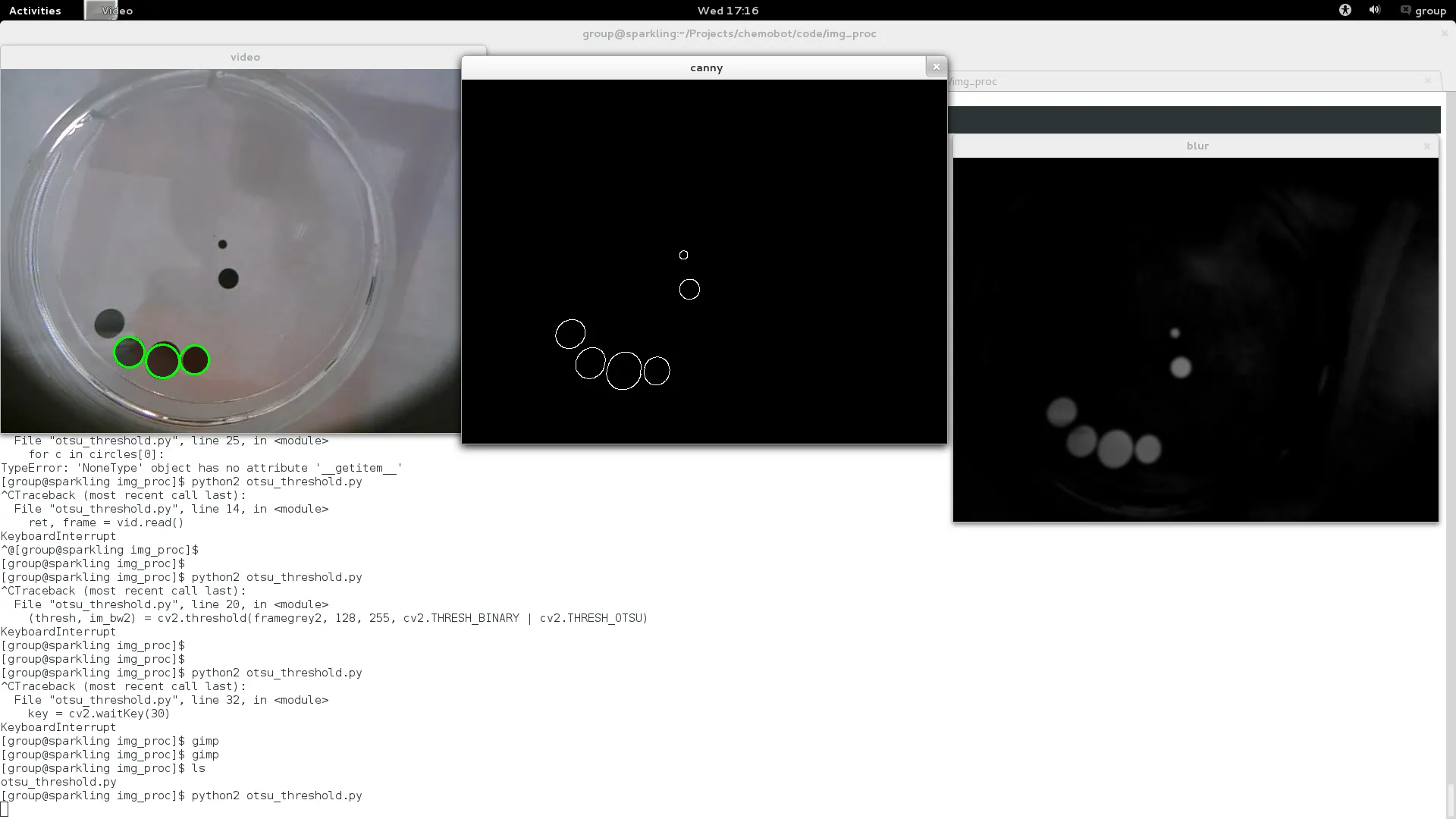
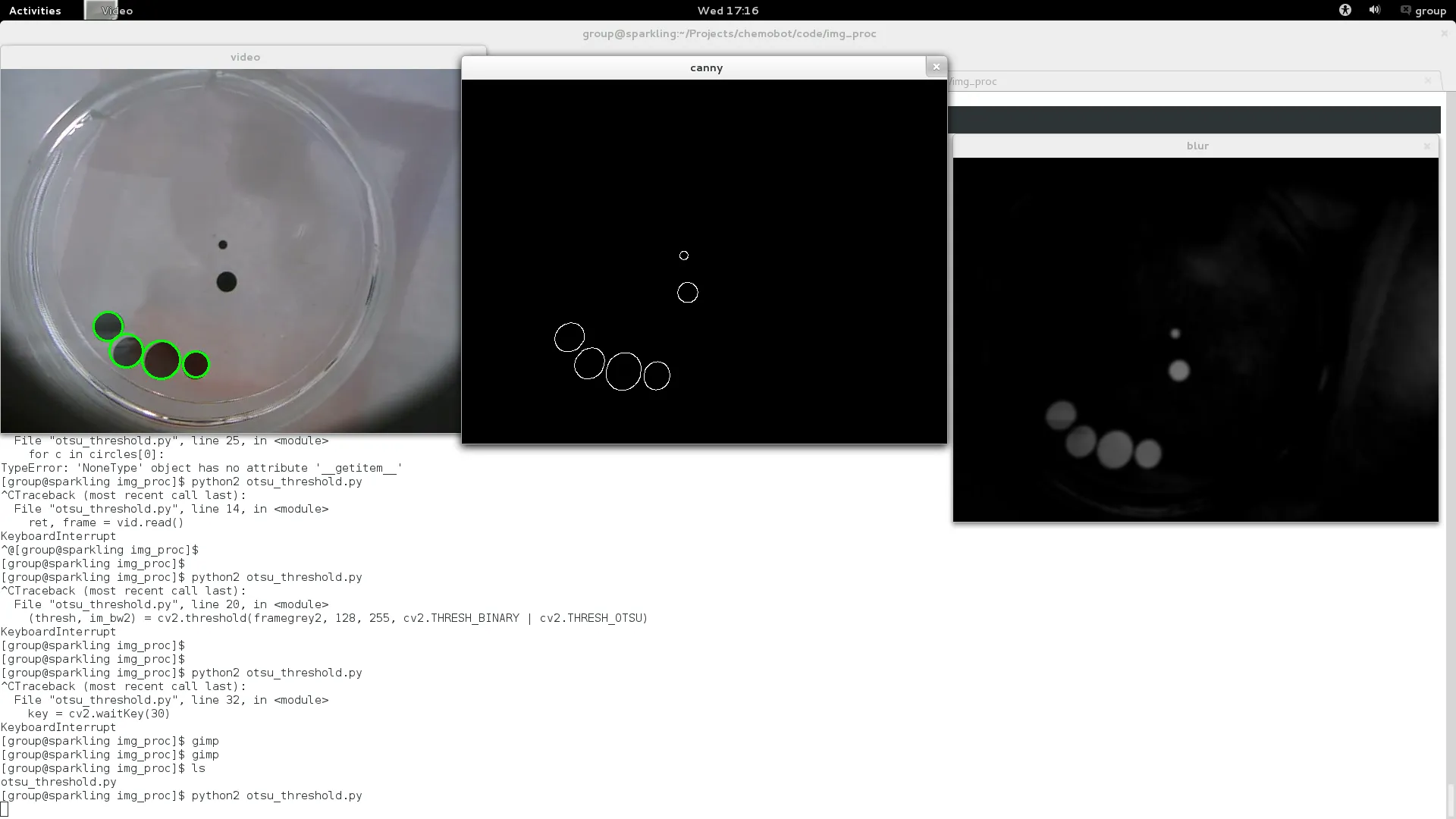
我认为canny边缘检测看起来非常好,而霍夫变换的结果非常不稳定,每个帧都会提供不同的结果。
例子:
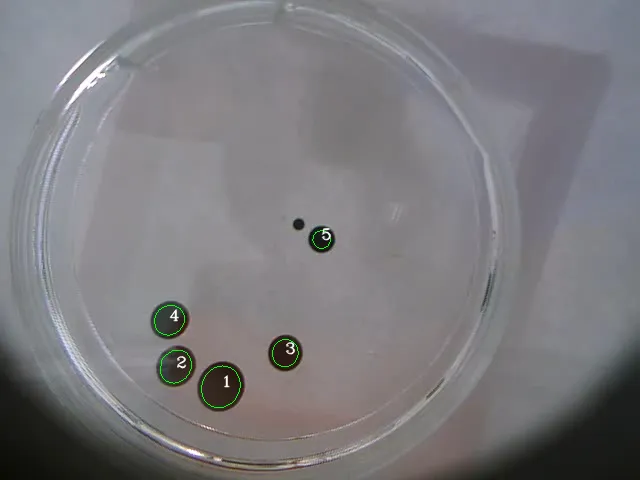
我有一个视频,其中有5个油滴,我正在尝试使用cv2.HoughCircles来找到它们。
这是我的代码:
import cv, cv2
import numpy as np
foreground1 = cv2.imread("foreground1.jpg")
vid = cv2.VideoCapture("NB14.avi")
cv2.namedWindow("video")
cv2.namedWindow("canny")
cv2.namedWindow("blur")
while True:
ret, frame = vid.read()
subtract1 = cv2.subtract( foreground1, frame)
framegrey1 = cv2.cvtColor(subtract1, cv.CV_RGB2GRAY)
blur = cv2.GaussianBlur(framegrey1, (0,0), 2)
circles = cv2.HoughCircles(blur, cv2.cv.CV_HOUGH_GRADIENT, 2, 10, np.array([]), 40, 80, 5, 100)
if circles is not None:
for c in circles[0]:
cv2.circle(frame, (c[0],c[1]), c[2], (0,255,0),2)
edges = cv2.Canny( blur, 40, 80 )
cv2.imshow("video", frame)
cv2.imshow("canny", edges)
cv2.imshow("blur", blur)
key = cv2.waitKey(30)
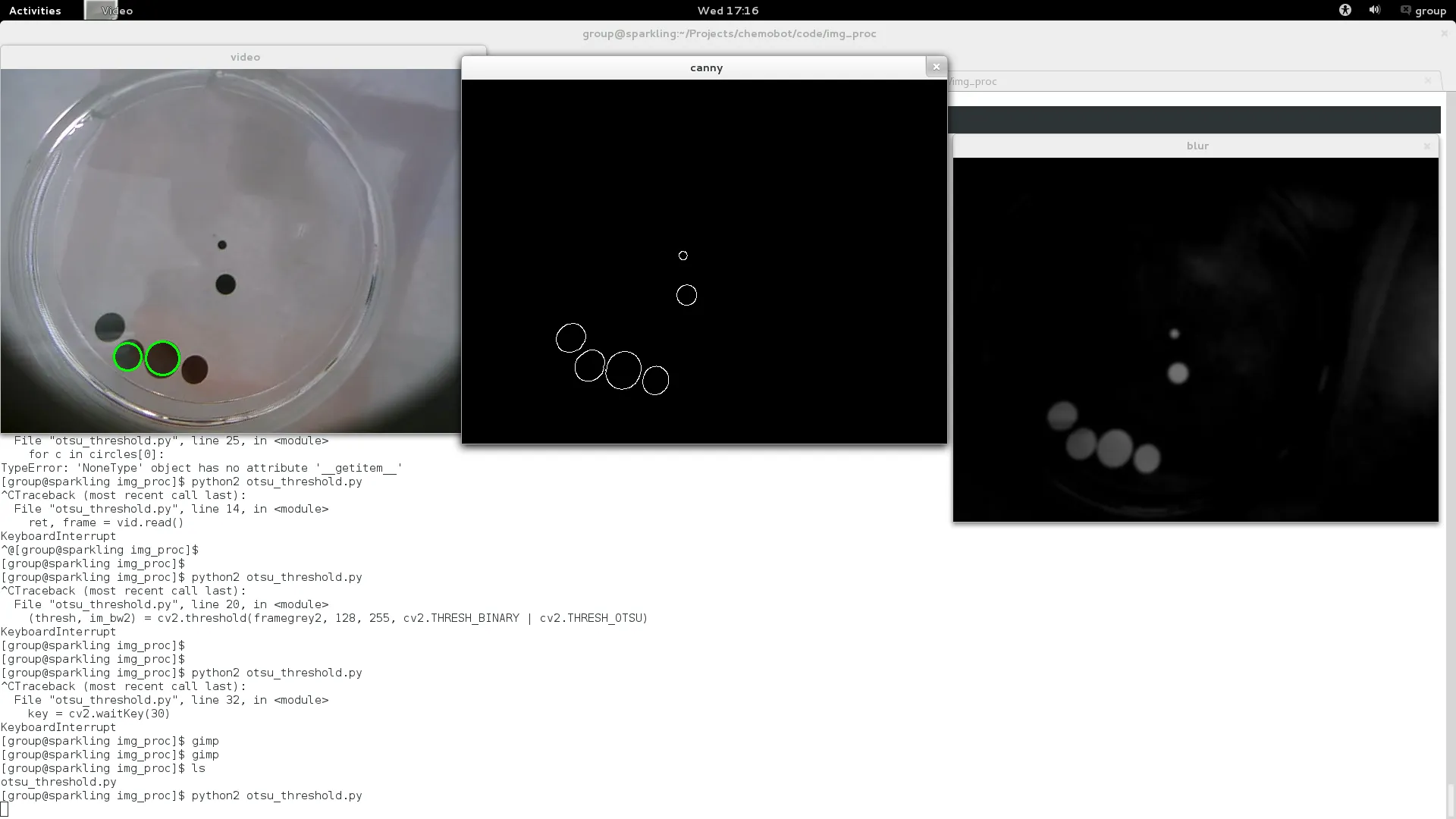
我认为canny边缘检测看起来非常好,而霍夫变换的结果非常不稳定,每个帧都会提供不同的结果。
例子: