我正在尝试使用最小二乘圆拟合代码来处理3D数据集。我已经根据需要添加了z坐标来修改它以适应3D点。我的修改对于一个点集很好,但对于另一个点集效果很差。如果代码有错误,请查看一下。
import trig_items
import numpy as np
from trig_items import *
from numpy import *
from matplotlib import pyplot as p
from scipy import optimize
# Coordinates of the 3D points
##x = r_[36, 36, 19, 18, 33, 26]
##y = r_[14, 10, 28, 31, 18, 26]
##z = r_[0, 1, 2, 3, 4, 5]
x = r_[ 2144.18908574, 2144.26880854, 2144.05552972, 2143.90303742, 2143.62520676,
2143.43628579, 2143.14005775, 2142.79919654, 2142.51436023, 2142.11240866,
2141.68564346, 2141.29333828, 2140.92596405, 2140.3475612, 2139.90848046,
2139.24661021, 2138.67384709, 2138.03313547, 2137.40301734, 2137.40908256,
2137.06611224, 2136.50943781, 2136.0553113, 2135.50313189, 2135.07049922,
2134.62098139, 2134.10459535, 2133.50838433, 2130.6600465, 2130.03537342,
2130.04047644, 2128.83522468, 2127.79827542, 2126.43513385, 2125.36700593,
2124.00350543, 2122.68564431, 2121.20709478, 2119.79047011, 2118.38417647,
2116.90063343, 2115.52685778, 2113.82246629, 2112.21159431, 2110.63180117,
2109.00713198, 2108.94434529, 2106.82777156, 2100.62343757, 2098.5090226,
2096.28787738, 2093.91550703, 2091.66075061, 2089.15316429, 2086.69753869,
2084.3002414, 2081.87590579, 2079.19141866, 2076.5394574, 2073.89128676,
2071.18786213]
y = r_[ 725.74913818, 724.43874065, 723.15226506, 720.45950581, 717.77827954,
715.07048092, 712.39633862, 709.73267688, 707.06039438, 704.43405908,
701.80074596, 699.15371526, 696.5309022, 693.96109921, 691.35585501,
688.83496327, 686.32148661, 683.80286662, 681.30705568, 681.30530975,
679.66483676, 678.01922321, 676.32721779, 674.6667554, 672.9658024,
671.23686095, 669.52021535, 667.84999077, 659.19757984, 657.46179949,
657.45700508, 654.46901086, 651.38177517, 648.41739432, 645.32356976,
642.39034578, 639.42628453, 636.51107198, 633.57732055, 630.63825133,
627.75308356, 624.80162215, 622.01980232, 619.18814892, 616.37688894,
613.57400131, 613.61535723, 610.4724493, 600.98277781, 597.84782844,
594.75983001, 591.77946964, 588.74874068, 585.84525834, 582.92311166,
579.99564481, 577.06666417, 574.30782762, 571.54115037, 568.79760614,
566.08551098]
z = r_[ 339.77146775, 339.60021095, 339.47645894, 339.47130963, 339.37216218,
339.4126132, 339.67942046, 339.40917728, 339.39500353, 339.15041461,
339.38959195, 339.3358209, 339.47764895, 339.17854867, 339.14624071,
339.16403926, 339.02308811, 339.27011082, 338.97684183, 338.95087698,
338.97321177, 339.02175448, 339.02543922, 338.88725411, 339.06942374,
339.0557553, 339.04414618, 338.89234303, 338.95572249, 339.00880416,
339.00413073, 338.91080374, 338.98214758, 339.01135789, 338.96393537,
338.73446188, 338.62784913, 338.72443217, 338.74880562, 338.69090173,
338.50765186, 338.49056867, 338.57353355, 338.6196255, 338.43754399,
338.27218569, 338.10587265, 338.43880881, 338.28962141, 338.14338705,
338.25784154, 338.49792568, 338.15572139, 338.52967693, 338.4594245,
338.1511823, 338.03711207, 338.19144663, 338.22022045, 338.29032321,
337.8623197 ]
# coordinates of the barycenter
xm = mean(x)
ym = mean(y)
zm = mean(z)
### Basic usage of optimize.leastsq
def calc_R(xc, yc, zc):
""" calculate the distance of each 3D points from the center (xc, yc, zc) """
return sqrt((x - xc) ** 2 + (y - yc) ** 2 + (z - zc) ** 2)
def func(c):
""" calculate the algebraic distance between the 3D points and the mean circle centered at c=(xc, yc, zc) """
Ri = calc_R(*c)
return Ri - Ri.mean()
center_estimate = xm, ym, zm
center, ier = optimize.leastsq(func, center_estimate)
##print center
xc, yc, zc = center
Ri = calc_R(xc, yc, zc)
R = Ri.mean()
residu = sum((Ri - R)**2)
print 'R =', R
所以,对于第一组被注释的
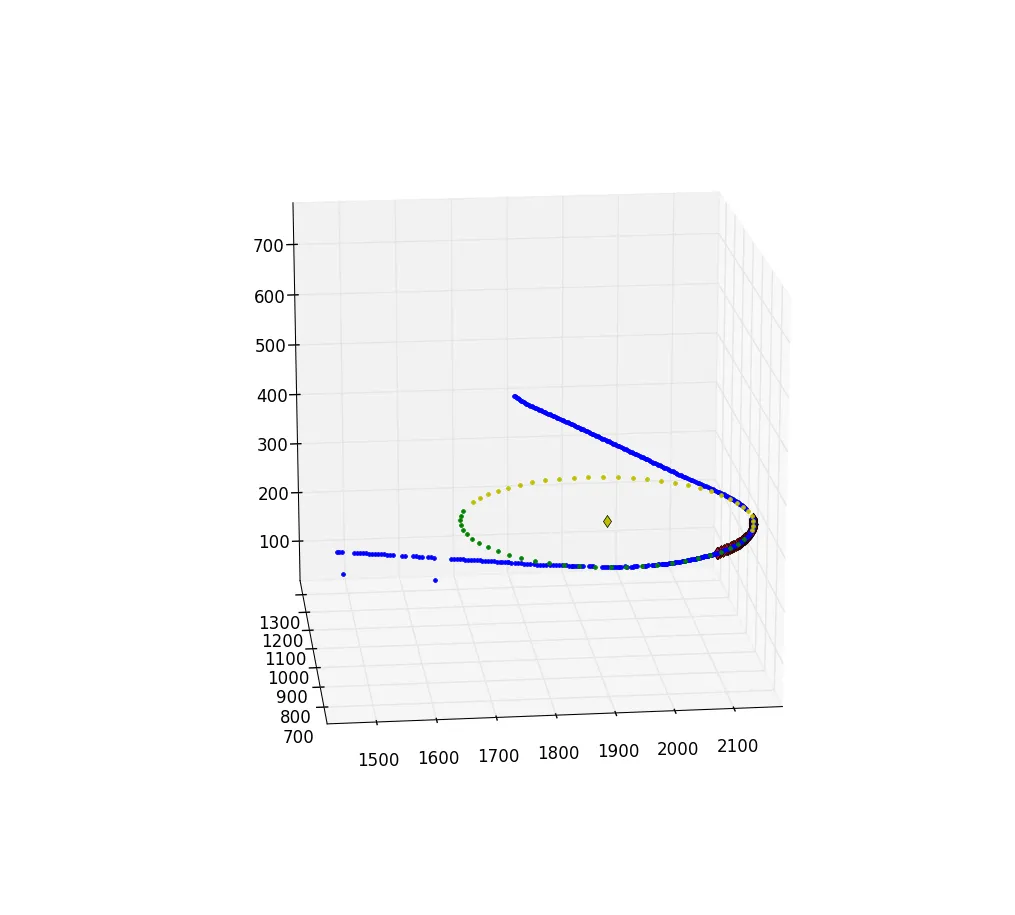
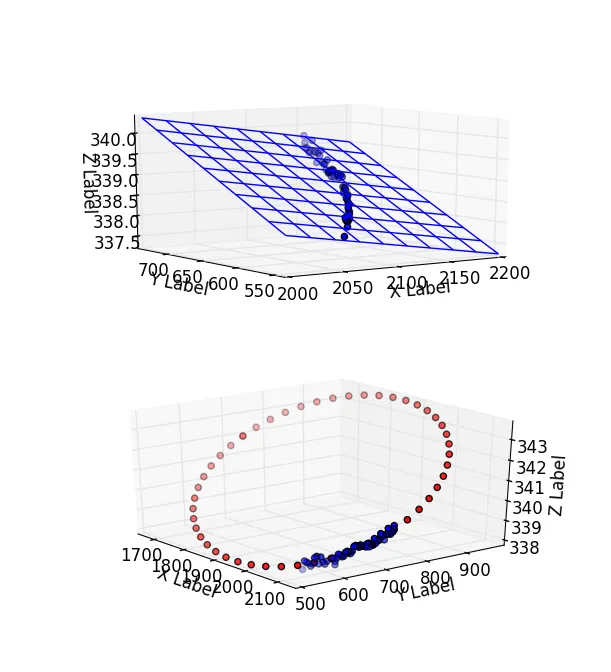
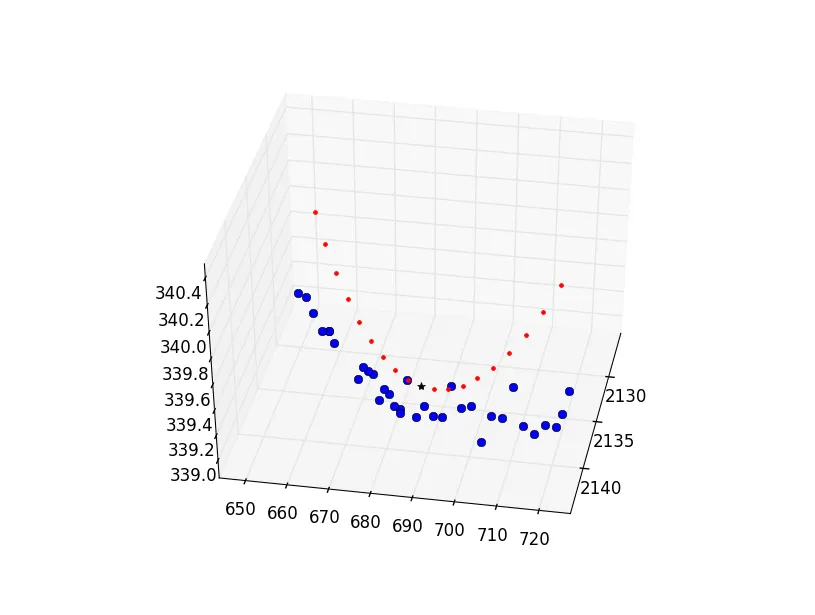
x, y, z(在代码中),它运行良好:输出结果为R = 39.0097846735。如果我使用第二组点运行代码(取消注释),则得到的半径为R = 108576.859834,几乎是直线。我绘制了最后一个。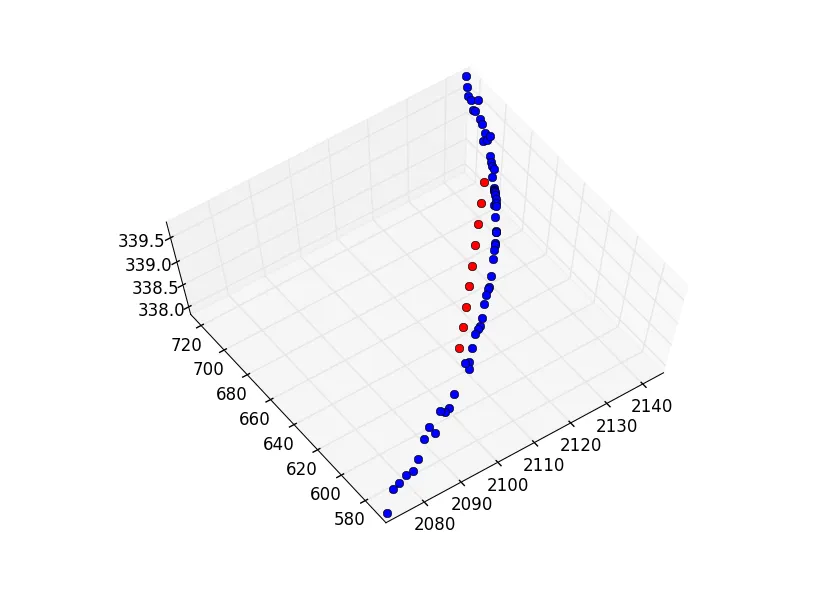 蓝色点是给定数据集,红色点是半径
蓝色点是给定数据集,红色点是半径R = 108576.859834的弧。显然,给定的数据集比结果半径小得多。这里是另一组点。
 很明显,最小二乘法不能正确工作。
很明显,最小二乘法不能正确工作。请帮忙解决这个问题。
更新:
这是我的解决方案:
### fit 3D arc into a set of 3D points ###
### output is the centre and the radius of the arc ###
def fitArc3d(arr, eps = 0.0001):
# Coordinates of the 3D points
x = numpy.array([arr[k][0] for k in range(len(arr))])
y = numpy.array([arr[k][4] for k in range(len(arr))])
z = numpy.array([arr[k][5] for k in range(len(arr))])
# coordinates of the barycenter
xm = mean(x)
ym = mean(y)
zm = mean(z)
### gradient descent minimisation method ###
pnts = [[x[k], y[k], z[k]] for k in range(len(x))]
meanP = Point(xm, ym, zm) # mean point
Ri = [Point(*meanP).distance(Point(*pnts[k])) for k in range(len(pnts))] # radii to the points
Rm = math.fsum(Ri) / len(Ri) # mean radius
dR = Rm + 10 # difference between mean radii
alpha = 0.1
c = meanP
cArr = []
while dR > eps:
cArr.append(c)
Jx = math.fsum([2 * (x[k] - c[0]) * (Ri[k] - Rm) / Ri[k] for k in range(len(Ri))])
Jy = math.fsum([2 * (y[k] - c[1]) * (Ri[k] - Rm) / Ri[k] for k in range(len(Ri))])
Jz = math.fsum([2 * (z[k] - c[2]) * (Ri[k] - Rm) / Ri[k] for k in range(len(Ri))])
gradJ = [Jx, Jy, Jz] # find gradient
c = [c[k] + alpha * gradJ[k] for k in range(len(c)) if len(c) == len(gradJ)] # find new centre point
Ri = [Point(*c).distance(Point(*pnts[k])) for k in range(len(pnts))] # calculate new radii
RmOld = Rm
Rm = math.fsum(Ri) / len(Ri) # calculate new mean radius
dR = abs(Rm - RmOld) # new difference between mean radii
return Point(*c), Rm
这段代码不是最优的(我没有时间进行精调),但它能够工作。