假设我有一个双轮物体,每个轮子都有独立的速度(lWheelV和rWheelV分别表示左右轮的速度)。每个轮子的速度限制在范围[-1, 1]之间(即在-1和1之间)。
 我需要什么样的数学知识来描述这样的对象,并且更重要的是,我如何在Java中实现能够复制这种行为的软件。
我需要什么样的数学知识来描述这样的对象,并且更重要的是,我如何在Java中实现能够复制这种行为的软件。
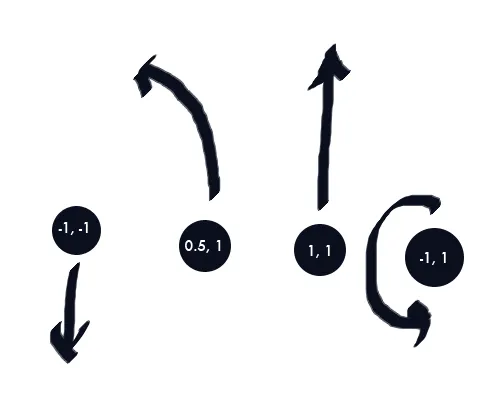
- 如果lWheelV = 1 & rWheelV = 1,则物体向前移动
- 如果lWheelV = -1 & rWheelV = 1,则物体向左转(逆时针方向)
- 如果lWheelV = 0.5 & rWheelV = 1,则物体将向前驱动,同时缓慢向左转
- 如果lWheelV = -1 & rWheelV = -1,则物体将向后移动。
我需要什么样的数学知识来描述这样的对象,并且更重要的是,我如何在Java中实现能够复制这种行为的软件。