我正在使用Gstreamer 1.2将我的IP摄像机的帧传输到OpenCV程序中。该流是(640*368 YUVj420p),我想将其转换为RGB888以便在我的OpenCV程序中使用。是否有一种方法可以使用Gstreamer进行此转换?还是我必须自己完成?如果是,请给我提供执行此转换的方程式。
2个回答
4
经过一些使用gstreamer的尝试后,我决定自己进行转换,并且成功了。
首先我们需要了解YUVj420p像素格式。
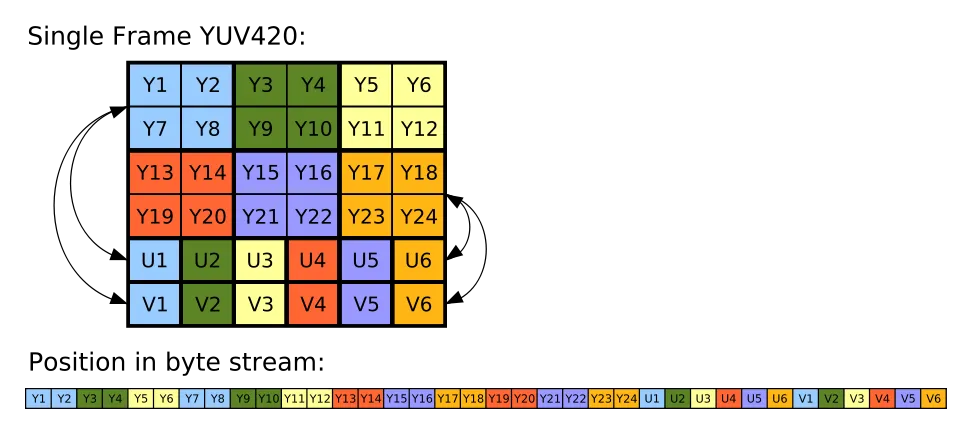
如上图所示,Y'UV420中的Y'、U和V分量是分别编码在连续的块中的。对于每个像素,都存储了一个Y'值,接着是每个2×2像素块的一个U值,最后是每个2×2块的一个V值。上图中使用相同的颜色显示相应的Y'、U和V值。从设备按字节流逐行读取时,Y'块将位于位置0,U块将位于位置x × y(例如此处为6×4 = 24),而V块将位于位置x × y +(x × y)/ 4(此处为6×4 +(6×4)/ 4 = 30)。(摘自)
以下是用Python实现的代码:
此代码将演示如何使用gstreamer将帧注入OpenCV并进行转换。
import gi
gi.require_version('Gst', '1.0')
from gi.repository import GObject, Gst
import numpy as np
import cv2
GObject.threads_init()
Gst.init(None)
def YUV_stream2RGB_frame(data):
w=640
h=368
size=w*h
stream=np.fromstring(data,np.uint8) #convert data form string to numpy array
#Y bytes will start form 0 and end in size-1
y=stream[0:size].reshape(h,w) # create the y channel same size as the image
#U bytes will start from size and end at size+size/4 as its size = framesize/4
u=stream[size:(size+(size/4))].reshape((h/2),(w/2))# create the u channel its size=framesize/4
#up-sample the u channel to be the same size as the y channel and frame using pyrUp func in opencv2
u_upsize=cv2.pyrUp(u)
#do the same for v channel
v=stream[(size+(size/4)):].reshape((h/2),(w/2))
v_upsize=cv2.pyrUp(v)
#create the 3-channel frame using cv2.merge func watch for the order
yuv=cv2.merge((y,u_upsize,v_upsize))
#Convert TO RGB format
rgb=cv2.cvtColor(yuv,cv2.cv.CV_YCrCb2RGB)
#show frame
cv2.imshow("show",rgb)
cv2.waitKey(5)
def on_new_buffer(appsink):
sample = appsink.emit('pull-sample')
#get the buffer
buf=sample.get_buffer()
#extract data stream as string
data=buf.extract_dup(0,buf.get_size())
YUV_stream2RGB_frame(data)
return False
def Init():
CLI="rtspsrc name=src location=rtsp://192.168.1.20:554/live/ch01_0 latency=10 !decodebin ! appsink name=sink"
#simplest way to create a pipline
pipline=Gst.parse_launch(CLI)
#getting the sink by its name set in CLI
appsink=pipline.get_by_name("sink")
#setting some important properties of appsnik
appsink.set_property("max-buffers",20) # prevent the app to consume huge part of memory
appsink.set_property('emit-signals',True) #tell sink to emit signals
appsink.set_property('sync',False) #no sync to make decoding as fast as possible
appsink.connect('new-sample', on_new_buffer) #connect signal to callable func
def run():
pipline.set_state(Gst.State.PLAYING)
GObject.MainLoop.run()
Init()
run()
- Eslam Ahmed
2
请问您是如何从相机中获取帧的?并且您是如何将其注入到您的OpenCV应用程序中的?
假设您在gstreamer之外获取帧,您应该使用以下管道:
appsrc caps="video/x-raw, format=I420, width=640, height=368" ! videoconvert ! capsfilter caps="video/x-raw, format=RGB" ! appsink
然后使用appsrc注入数据,并使用appsink接收返回的数据。如果您从http或v4l2中获取数据,则可以将appsrc替换为souphttpsrc或v4l2src。
假设您在gstreamer之外获取帧,您应该使用以下管道:
appsrc caps="video/x-raw, format=I420, width=640, height=368" ! videoconvert ! capsfilter caps="video/x-raw, format=RGB" ! appsink
然后使用appsrc注入数据,并使用appsink接收返回的数据。如果您从http或v4l2中获取数据,则可以将appsrc替换为souphttpsrc或v4l2src。
- thiagoss
1
我会尽快尝试您的解决方案。 - Eslam Ahmed
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接
- 相关问题
- 7 使用DirectX11像素着色器将BGRA格式的绿色图像转换为YUV444格式。
- 23 如何将16位RGB565转换为24位RGB888?
- 3 如何在C#中将RGB555转换为RGB888?
- 11 RGB888 转 RGB565 / 位移
- 9 使用GStreamer将视频转换为WebM
- 5 将格式从yuvj420p转换为yuv420p
- 7 如何将YUVJ420P格式的FFMPEG AVFrame转换为AVFoundation cVPixelBufferRef?
- 3 使用GStreamer将dvblast的流媒体转换为HLS
- 9 在C语言中将yuv420p转换为rgb888
- 3 将Gstreamer管道转换为Python代码