使用以下代码,将颜色传递给Blob检测器,然后将图像传递给检测器。
private Scalar converScalarRgba2HSV(Scalar rgba) {
Mat pointMatHsv= new Mat();
Mat pointMatRgba = new Mat(1, 1, CvType.CV_8UC3, rgba);
Imgproc.cvtColor(pointMatRgba,pointMatHsv, Imgproc.COLOR_RGB2HSV_FULL, 4);
return new Scalar(pointMatHsv.get(0, 0));}
// Blob 检测器
public class ColorBlobDetector {
private Scalar mLowerBound = new Scalar(0);
private Scalar mUpperBound = new Scalar(0);
private static double mMinContourArea = 0.1;
private Scalar mColorRadius = new Scalar(25,50,50,0);
private Mat mSpectrum = new Mat();
private List<MatOfPoint> mContours = new ArrayList<MatOfPoint>();
Mat mPyrDownMat = new Mat();
Mat mHsvMat = new Mat();
Mat mMask = new Mat();
Mat mDilatedMask = new Mat();
Mat mHierarchy = new Mat();
public void setColorRadius(Scalar radius) {
mColorRadius = radius;
}
public void setHsvColor(Scalar hsvColor) {
double minH = (hsvColor.val[0] >= mColorRadius.val[0]) ? hsvColor.val[0]-mColorRadius.val[0] : 0;
double maxH = (hsvColor.val[0]+mColorRadius.val[0] <= 255) ? hsvColor.val[0]+mColorRadius.val[0] : 255;
mLowerBound.val[0] = minH;
mUpperBound.val[0] = maxH;
mLowerBound.val[1] = hsvColor.val[1] - mColorRadius.val[1];
mUpperBound.val[1] = hsvColor.val[1] + mColorRadius.val[1];
mLowerBound.val[2] = hsvColor.val[2] - mColorRadius.val[2];
mUpperBound.val[2] = hsvColor.val[2] + mColorRadius.val[2];
mLowerBound.val[3] = 0;
mUpperBound.val[3] = 255;
Mat spectrumHsv = new Mat(1, (int)(maxH-minH), CvType.CV_8UC3);
for (int j = 0; j < maxH-minH; j++) {
byte[] tmp = {(byte)(minH+j), (byte)255, (byte)255};
spectrumHsv.put(0, j, tmp);
}
Imgproc.cvtColor(spectrumHsv, mSpectrum, Imgproc.COLOR_HSV2RGB_FULL, 4);
}
public Mat getSpectrum() {
return mSpectrum;
}
public void setMinContourArea(double area) {
mMinContourArea = area;
}
public void process(Mat rgbaImage) {
Imgproc.pyrDown(rgbaImage, mPyrDownMat);
Imgproc.pyrDown(mPyrDownMat, mPyrDownMat);
Imgproc.cvtColor(mPyrDownMat, mHsvMat, Imgproc.COLOR_RGB2HSV_FULL);
Core.inRange(mHsvMat, mLowerBound, mUpperBound, mMask);
Imgproc.dilate(mMask, mDilatedMask, new Mat());
List<MatOfPoint> contours = new ArrayList<MatOfPoint>();
Imgproc.findContours(mDilatedMask, contours, mHierarchy, Imgproc.RETR_EXTERNAL, Imgproc.CHAIN_APPROX_SIMPLE);
double maxArea = 0;
Iterator<MatOfPoint> each = contours.iterator();
while (each.hasNext()) {
MatOfPoint wrapper = each.next();
double area = Imgproc.contourArea(wrapper);
if (area > maxArea)
maxArea = area;
}
mContours.clear();
each = contours.iterator();
while (each.hasNext()) {
MatOfPoint contour = each.next();
if (Imgproc.contourArea(contour) > mMinContourArea*maxArea) {
Core.multiply(contour, new Scalar(4,4), contour);
mContours.add(contour);
}
}
}
public List<MatOfPoint> getContours() {
return mContours;
}}
现在设置探测器
public void initDetector() {
mDetector = new ColorBlobDetector();
mSpectrum = new Mat();
mBlobColorRgba = new Scalar(255);
mBlobColorHsv = new Scalar(255);
SPECTRUM_SIZE = new org.opencv.core.Size(500, 64);
CONTOUR_COLOR = new Scalar(0, 255, 0, 255);
mDetector.setHsvColor(converScalarRgba2HSV(new Scalar(0,255,255,255)));
Imgproc.resize(mDetector.getSpectrum(), mSpectrum, SPECTRUM_SIZE, 0, 0, Imgproc.INTER_LINEAR_EXACT);
mIsColorSelected = true;
}
现在将图像传递给检测器对象
Mat mRgba = new Mat(inputFrame.height(), inputFrame.width(), CvType.CV_8UC4);
mRgba = inputFrame;
mDetector.process(mRgba);
List<MatOfPoint> contours = mDetector.getContours();
Log.e(TAG, "Contours count: " + contours.size());
drawContours(mRgba, contours, -1, CONTOUR_COLOR);
return mRgba;
编程愉快!!!
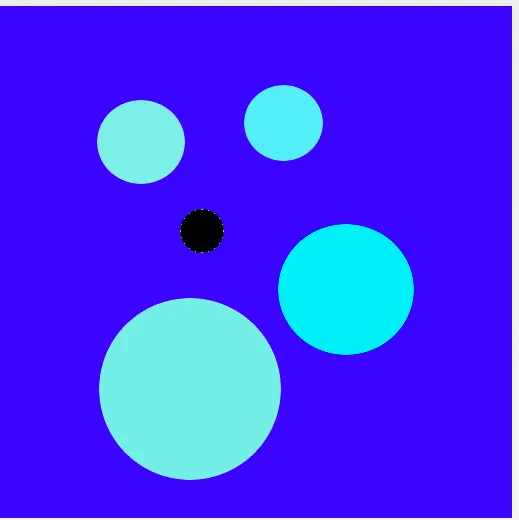
 这是应用BGR2HSV后的图片:
这是应用BGR2HSV后的图片:
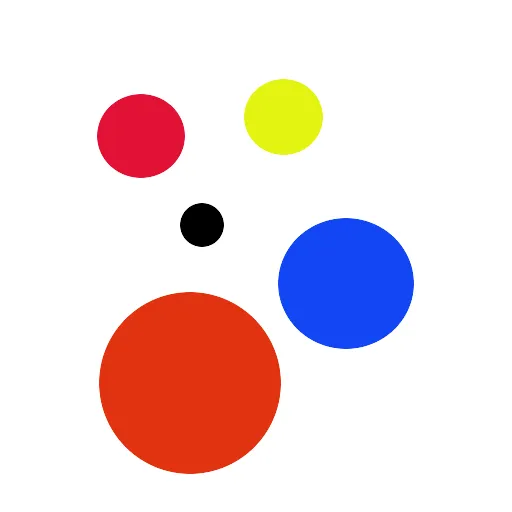
 当我使用较低的红色色调范围时,它会检测到蓝色圆圈。当我使用较高的红色色调范围时,它会给我黑色bmp(没有检测到任何东西)。这怎么可能?我做错了什么?这个代码是从Python移植到Java的,为什么结果不同呢?
提前感谢您的帮助。
当我使用较低的红色色调范围时,它会检测到蓝色圆圈。当我使用较高的红色色调范围时,它会给我黑色bmp(没有检测到任何东西)。这怎么可能?我做错了什么?这个代码是从Python移植到Java的,为什么结果不同呢?
提前感谢您的帮助。