我可以帮您进行翻译。以下是翻译的结果:
我尝试了中值模糊处理,调整参数,得到了以下结果:
有没有改进算法或图像处理技术的方法,可以忽略嘈杂的沙地背景,同时允许Canny边缘检测找到所有物体,并使程序检测和绘制所有物体的轮廓。
代码:
我正在尝试制作一个计算机视觉程序,它可以检测垃圾和随意扔在嘈杂背景中的垃圾,比如沙滩(由于沙子而嘈杂)。
原始图像:

使用非图像处理方法进行Canny边缘检测:
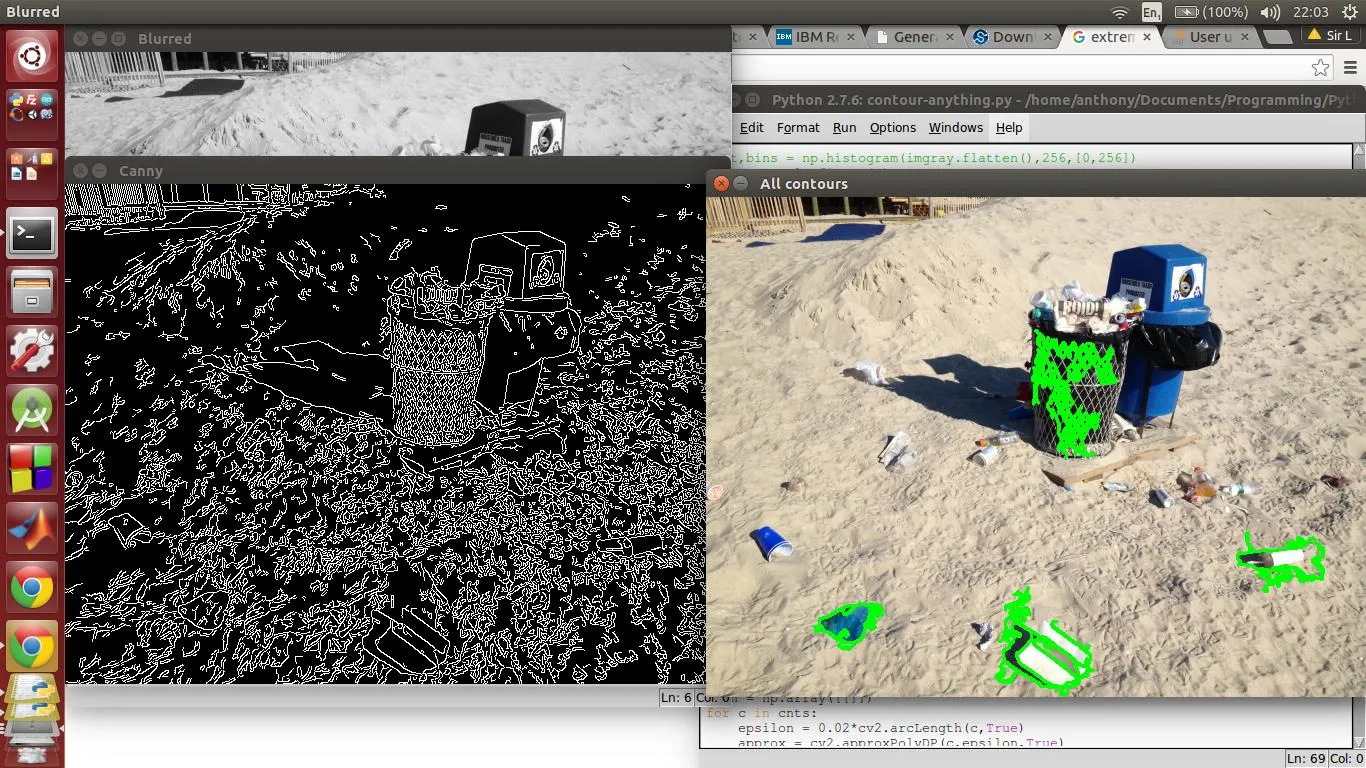
我尝试了中值模糊处理,调整参数,得到了以下结果:
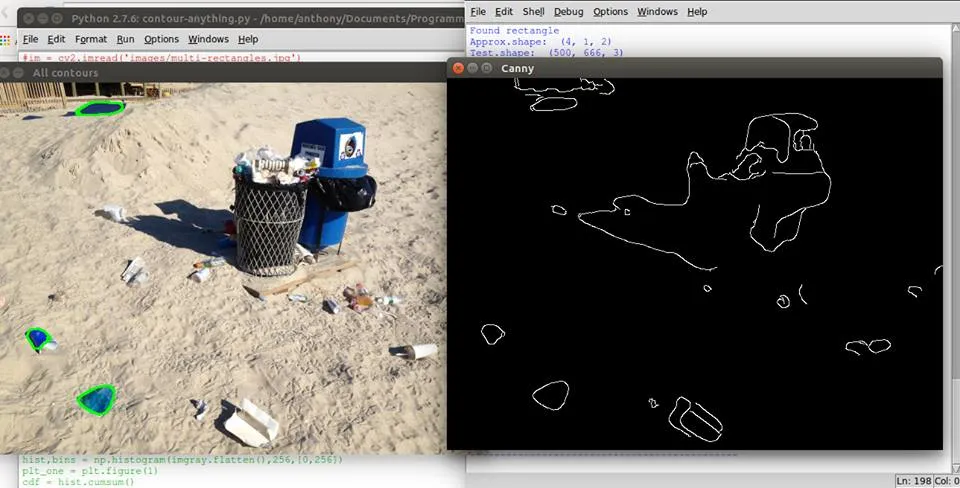
有没有改进算法或图像处理技术的方法,可以忽略嘈杂的沙地背景,同时允许Canny边缘检测找到所有物体,并使程序检测和绘制所有物体的轮廓。
代码:
from pyimagesearch.transform import four_point_transform
from matplotlib import pyplot as plt
import numpy as np
import cv2
import imutils
im = cv2.imread('images/beach_trash_3.jpg')
#cv2.imshow('Original', im)
# Histogram equalization to improve contrast
###
#im = np.fliplr(im)
im = imutils.resize(im, height = 500)
imgray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
# Contour detection
#ret,thresh = cv2.threshold(imgray,127,255,0)
#imgray = cv2.GaussianBlur(imgray, (5, 5), 200)
imgray = cv2.medianBlur(imgray, 11)
cv2.imshow('Blurred', imgray)
'''
hist,bins = np.histogram(imgray.flatten(),256,[0,256])
plt_one = plt.figure(1)
cdf = hist.cumsum()
cdf_normalized = cdf * hist.max()/ cdf.max()
cdf_m = np.ma.masked_equal(cdf,0)
cdf_m = (cdf_m - cdf_m.min())*255/(cdf_m.max()-cdf_m.min())
cdf = np.ma.filled(cdf_m,0).astype('uint8')
imgray = cdf[imgray]
cv2.imshow('Histogram Normalization', imgray)
'''
'''
imgray = cv2.adaptiveThreshold(imgray,255,cv2.ADAPTIVE_THRESH_GAUSSIAN_C,\
cv2.THRESH_BINARY,11,2)
'''
thresh = imgray
#imgray = cv2.medianBlur(imgray,5)
#imgray = cv2.Canny(imgray,10,500)
thresh = cv2.Canny(imgray,75,200)
#thresh = imgray
cv2.imshow('Canny', thresh)
contours, hierarchy = cv2.findContours(thresh.copy(),cv2.RETR_TREE,cv2.CHAIN_APPROX_SIMPLE)
cnts = sorted(contours, key = cv2.contourArea, reverse = True)[:5]
test = im.copy()
cv2.drawContours(test, cnts, -1,(0,255,0),2)
cv2.imshow('All contours', test)
print '---------------------------------------------'
##### Code to show each contour #####
main = np.array([[]])
for c in cnts:
epsilon = 0.02*cv2.arcLength(c,True)
approx = cv2.approxPolyDP(c,epsilon,True)
test = im.copy()
cv2.drawContours(test, [approx], -1,(0,255,0),2)
#print 'Contours: ', contours
if len(approx) == 4:
print 'Found rectangle'
print 'Approx.shape: ', approx.shape
print 'Test.shape: ', test.shape
# frame_f = frame_f[y: y+h, x: x+w]
frame_f = test[approx[0,0,1]:approx[2,0,1], approx[0,0,0]:approx[2,0,0]]
print 'frame_f.shape: ', frame_f.shape
main = np.append(main, approx[None,:][None,:])
print 'main: ', main
# Uncomment in order to show all rectangles in image
#cv2.imshow('Show Ya', test)
#print 'Approx: ', approx.shape
#cv2.imshow('Show Ya', frame_f)
cv2.waitKey()
print '---------------------------------------------'
cv2.drawContours(im, cnts, -1,(0,255,0),2)
print main.shape
print main
cv2.imshow('contour-test', im)
cv2.waitKey()