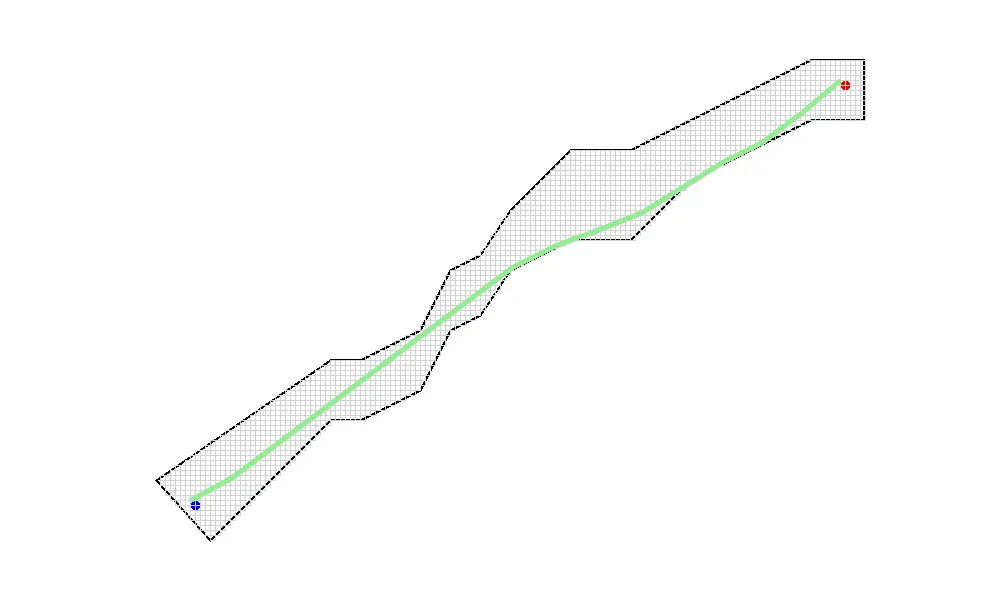
我正在寻找多边形(路径)中的最短路径。它从左下角的中心边界(蓝色)开始,以右上角的中心边界(红色)结束。不允许离开路径。
我可以使用哪种算法来计算这条路线?我需要一个点列表来绘制最短路径。例子代码会很好。
我可以使用哪种算法来计算这条路线?我需要一个点列表来绘制最短路径。例子代码会很好。
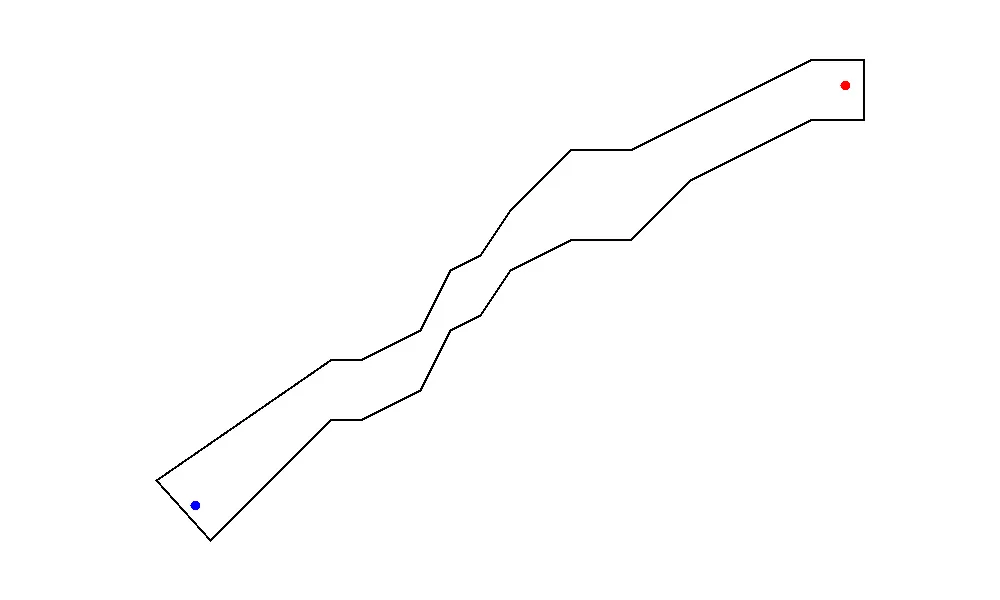
我的多边形起点和终点示例
var points = new List<Point> { new Point(210, 540), new Point(330, 420), new Point(360, 420), new Point(420, 390), new Point(450, 330), new Point(480, 315), new Point(510, 270), new Point(570, 240), new Point(630, 240), new Point(690, 180), new Point(750, 150), new Point(810, 120), new Point(864, 120), new Point(864, 60), new Point(810, 60), new Point(750, 90), new Point(690, 120), new Point(630, 150), new Point(570, 150), new Point(510, 210), new Point(480, 255), new Point(450, 270), new Point(420, 330), new Point(360, 360), new Point(330, 360), new Point(156, 480) };
var image = new Bitmap(1000, 600);
using (var graphics = Graphics.FromImage(image))
{
graphics.Clear(Color.White);
graphics.FillPie(Brushes.Blue, 190, 500, 10, 10, 0, 360);
graphics.FillPie(Brushes.Red, 840, 80, 10, 10, 0, 360);
graphics.DrawPolygon(new Pen(Color.Black, 2), points.ToArray());
}
image.Save("example.bmp");