你好,
假设我在R中使用
这句话的翻译是:“这就得到了:”
谢谢您的帮助。
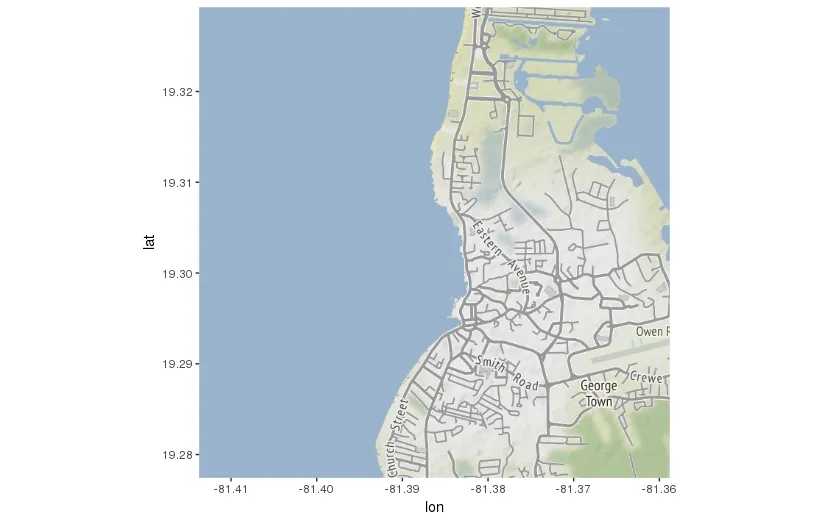
假设我在R中使用
library(ggmap)制作这张地图:ggmap(get_map(location = c(lon = -81.38630, lat = 19.30340), source = "stamen", maptype = "terrain", zoom = 14))
这句话的翻译是:“这就得到了:”
谢谢您的帮助。
grid.newpagehttps://www.rdocumentation.org/packages/grid/versions/3.4.1/topics/grid.newpage - Marco Sandrigrid.newpage()。再次感谢! - hpycowplot包也可以实现这个功能:https://cran.r-project.org/web/packages/cowplot/vignettes/introduction.html - hpy