我有一个开源的iOS应用程序,使用自定义的OpenGL ES 2.0着色器显示分子结构的3D表示。它通过在矩形上绘制过程生成的球体和圆柱体冒充物来实现,而不是使用大量顶点构建这些相同的形状。这种方法的缺点是需要在片段着色器中计算这些冒充物对象的每个片段的深度值,以便在对象重叠时使用。
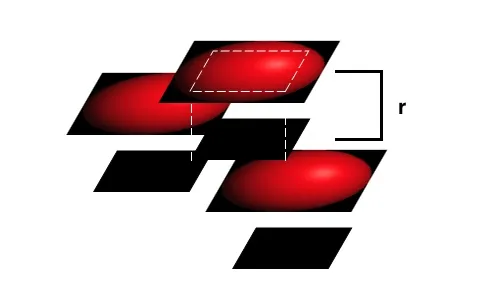
不幸的是,OpenGL ES 2.0 不允许你写入gl_FragDepth,因此我需要将这些值输出到自定义深度纹理中。我使用帧缓冲对象(FBO)对场景进行一次遍历,仅渲染与深度值相对应的颜色,并将结果存储到纹理中。然后将该纹理加载到我的渲染过程的第二部分中,生成实际的屏幕图像。如果该阶段的片段处于存储在该点屏幕上的深度纹理中的深度级别,则会显示它。否则,就会被丢弃。更多关于该过程的信息,包括图表,可以在我的帖子这里中找到。
这个深度纹理的生成过程是我渲染流程中的瓶颈,我正在寻找一种方法使它更快。似乎比它应该的要慢,但我无法想出原因。为了实现深度纹理的正确生成,禁用了
在iPad 1上,使用透传着色器显示一个DNA空间填充模型的一帧需要35-68毫秒的时间(在iPhone 4上为18-35毫秒)。根据PowerVR PVRUniSCo编译器(他们的SDK的一部分)的说法,该着色器最佳情况下使用11个GPU周期,最差情况下使用16个周期。我知道你不建议在着色器中使用分支,但在这种情况下,这比其他方式表现更好。
不幸的是,OpenGL ES 2.0 不允许你写入gl_FragDepth,因此我需要将这些值输出到自定义深度纹理中。我使用帧缓冲对象(FBO)对场景进行一次遍历,仅渲染与深度值相对应的颜色,并将结果存储到纹理中。然后将该纹理加载到我的渲染过程的第二部分中,生成实际的屏幕图像。如果该阶段的片段处于存储在该点屏幕上的深度纹理中的深度级别,则会显示它。否则,就会被丢弃。更多关于该过程的信息,包括图表,可以在我的帖子这里中找到。
这个深度纹理的生成过程是我渲染流程中的瓶颈,我正在寻找一种方法使它更快。似乎比它应该的要慢,但我无法想出原因。为了实现深度纹理的正确生成,禁用了
GL_DEPTH_TEST,启用了GL_BLEND和glBlendFunc(GL_ONE, GL_ONE),并将glBlendEquation()设置为GL_MIN_EXT。我知道像这样以瓦片为基础的延迟渲染器(如iOS设备中的PowerVR系列)输出的场景不是最快的,但我想不出更好的方法。
对于球体(最常见的显示元素)的深度片段着色器似乎是这个瓶颈的核心(仪器中的渲染器利用率达到了99%,表明我的限制在于片段处理)。它目前看起来像下面这样:
precision mediump float;
varying mediump vec2 impostorSpaceCoordinate;
varying mediump float normalizedDepth;
varying mediump float adjustedSphereRadius;
const vec3 stepValues = vec3(2.0, 1.0, 0.0);
const float scaleDownFactor = 1.0 / 255.0;
void main()
{
float distanceFromCenter = length(impostorSpaceCoordinate);
if (distanceFromCenter > 1.0)
{
gl_FragColor = vec4(1.0);
}
else
{
float calculatedDepth = sqrt(1.0 - distanceFromCenter * distanceFromCenter);
mediump float currentDepthValue = normalizedDepth - adjustedSphereRadius * calculatedDepth;
// Inlined color encoding for the depth values
float ceiledValue = ceil(currentDepthValue * 765.0);
vec3 intDepthValue = (vec3(ceiledValue) * scaleDownFactor) - stepValues;
gl_FragColor = vec4(intDepthValue, 1.0);
}
}
在iPad 1上,使用透传着色器显示一个DNA空间填充模型的一帧需要35-68毫秒的时间(在iPhone 4上为18-35毫秒)。根据PowerVR PVRUniSCo编译器(他们的SDK的一部分)的说法,该着色器最佳情况下使用11个GPU周期,最差情况下使用16个周期。我知道你不建议在着色器中使用分支,但在这种情况下,这比其他方式表现更好。
当我将其简化为
precision mediump float;
varying mediump vec2 impostorSpaceCoordinate;
varying mediump float normalizedDepth;
varying mediump float adjustedSphereRadius;
void main()
{
gl_FragColor = vec4(adjustedSphereRadius * normalizedDepth * (impostorSpaceCoordinate + 1.0) / 2.0, normalizedDepth, 1.0);
}
iPad 1需要18-35毫秒,而iPhone 4只需要1.7-2.4毫秒。该着色器的估计GPU周期数为8个周期。基于周期计算的渲染时间变化似乎不是线性的。
最后,如果我只输出一个恒定的颜色:
precision mediump float;
void main()
{
gl_FragColor = vec4(0.5, 0.5, 0.5, 1.0);
}
iPad 1上的渲染时间降至1.1-2.3毫秒(iPhone 4上为1.3毫秒)。
第二个着色器中的非线性缩放和iPad和iPhone 4之间的突然变化使我觉得我可能漏掉了什么。如果您希望自行尝试,可以从here下载包含这三种着色器变体(请查看SphereDepth.fsh文件并注释适当的部分)和测试模型的完整源项目。
如果您已经阅读到这里,我的问题是:基于这些分析信息,如何提高iOS设备上自定义深度着色器的渲染性能?