所以,您发布了来自Boost库的示例。在2019年之前的某个版本。
显然,那不会代表您的图形。首先要现代化:
实时
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/graph_utility.hpp>
#include <boost/graph/isomorphism.hpp>
#include <iostream>
using boost::make_iterator_range;
int main() {
constexpr int n = 12;
using graph_t = boost::adjacency_list<boost::vecS, boost::listS, boost::undirectedS,
boost::property<boost::vertex_index_t, int>>;
graph_t g1(n), g2(n);
using V = graph_t::vertex_descriptor;
std::vector<V> v1(n), v2(n);
auto v1_index_map = get(boost::vertex_index, g1);
auto v2_index_map = get(boost::vertex_index, g2);
for (int id = 0; auto v : make_iterator_range(vertices(g1))) {
v1_index_map[v] = id;
v1[id] = v;
++id;
}
for (int id = 0; auto v : make_iterator_range(vertices(g2))) {
v2_index_map[v] = id;
v2[id] = v;
++id;
}
add_edge(v1[0], v1[1], g1);
add_edge(v1[1], v1[2], g1);
add_edge(v1[0], v1[2], g1);
add_edge(v1[3], v1[4], g1);
add_edge(v1[4], v1[5], g1);
add_edge(v1[5], v1[6], g1);
add_edge(v1[6], v1[3], g1);
add_edge(v1[7], v1[8], g1);
add_edge(v1[8], v1[9], g1);
add_edge(v1[9], v1[10], g1);
add_edge(v1[10], v1[11], g1);
add_edge(v1[11], v1[7], g1);
add_edge(v2[9], v2[10], g2);
add_edge(v2[10], v2[11], g2);
add_edge(v2[11], v2[9], g2);
add_edge(v2[0], v2[1], g2);
add_edge(v2[1], v2[3], g2);
add_edge(v2[3], v2[2], g2);
add_edge(v2[2], v2[0], g2);
add_edge(v2[4], v2[5], g2);
add_edge(v2[5], v2[7], g2);
add_edge(v2[7], v2[8], g2);
add_edge(v2[8], v2[6], g2);
add_edge(v2[6], v2[4], g2);
std::vector<V> f(n);
bool ret = isomorphism(g1, g2, isomorphism_map(make_iterator_property_map(f.begin(), v1_index_map)));
std::cout << "isomorphic? " << std::boolalpha << ret << std::endl;
for (std::cout << "f: "; auto el : f)
std::cout << get(v2_index_map, el) << " ";
std::cout << std::endl;
}
接下来,简化一下,因为您没有告诉我们不使用
vecS提供的内在顶点索引的原因:
Live On Coliru
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/graph_utility.hpp>
#include <boost/graph/isomorphism.hpp>
#include <iostream>
int main() {
using G = boost::adjacency_list<boost::vecS, boost::vecS, boost::undirectedS>;
using V = G::vertex_descriptor;
constexpr int n = 12;
G g1(n);
G g2(n);
for (auto [s, t] : {std::pair{0, 1}, {1, 2}, {0, 2}, {3, 4}, {4, 5}, {5, 6},
{6, 3}, {7, 8}, {8, 9}, {9, 10}, {10, 11}, {11, 7}})
{
add_edge(s, t, g1);
}
for (auto [s, t] : {std::pair{9, 10}, {10, 11}, {11, 9}, {0, 1}, {1, 3}, {3, 2},
{2, 0}, {4, 5}, {5, 7}, {7, 8}, {8, 6}, {6, 4}})
{
add_edge(s, t, g2);
}
std::vector<V> f(n);
bool ret = isomorphism(g1, g2, boost::isomorphism_map(f.data()));
std::cout << "isomorphic? " << std::boolalpha << ret << std::endl;
for (std::cout << "f: "; auto v : f)
std::cout << v << " ";
std::cout << std::endl;
}
添加数据
由于您需要类型(A/B),因此让我们将其添加到顶点属性中:
struct Node {
enum Type {A,B} type;
};
using Graph = boost::adjacency_list<boost::vecS, boost::vecS, boost::undirectedS, Node>;
我们也来创建一下键合图:
using Bond = std::pair<V, V>;
struct Input {
std::vector<Type> nodes;
std::vector<Bond> bonds;
};
using Problem = std::vector<Input>;
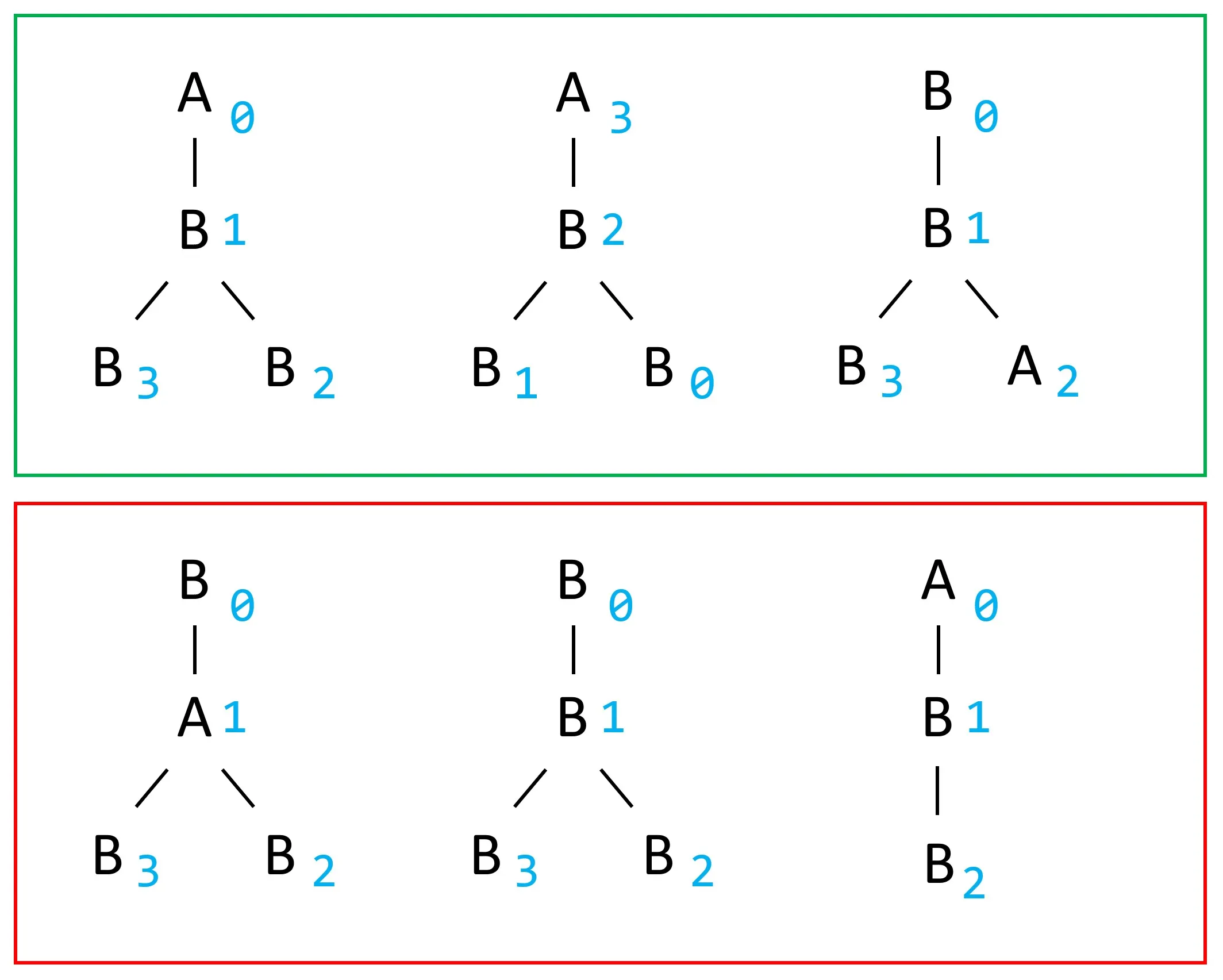
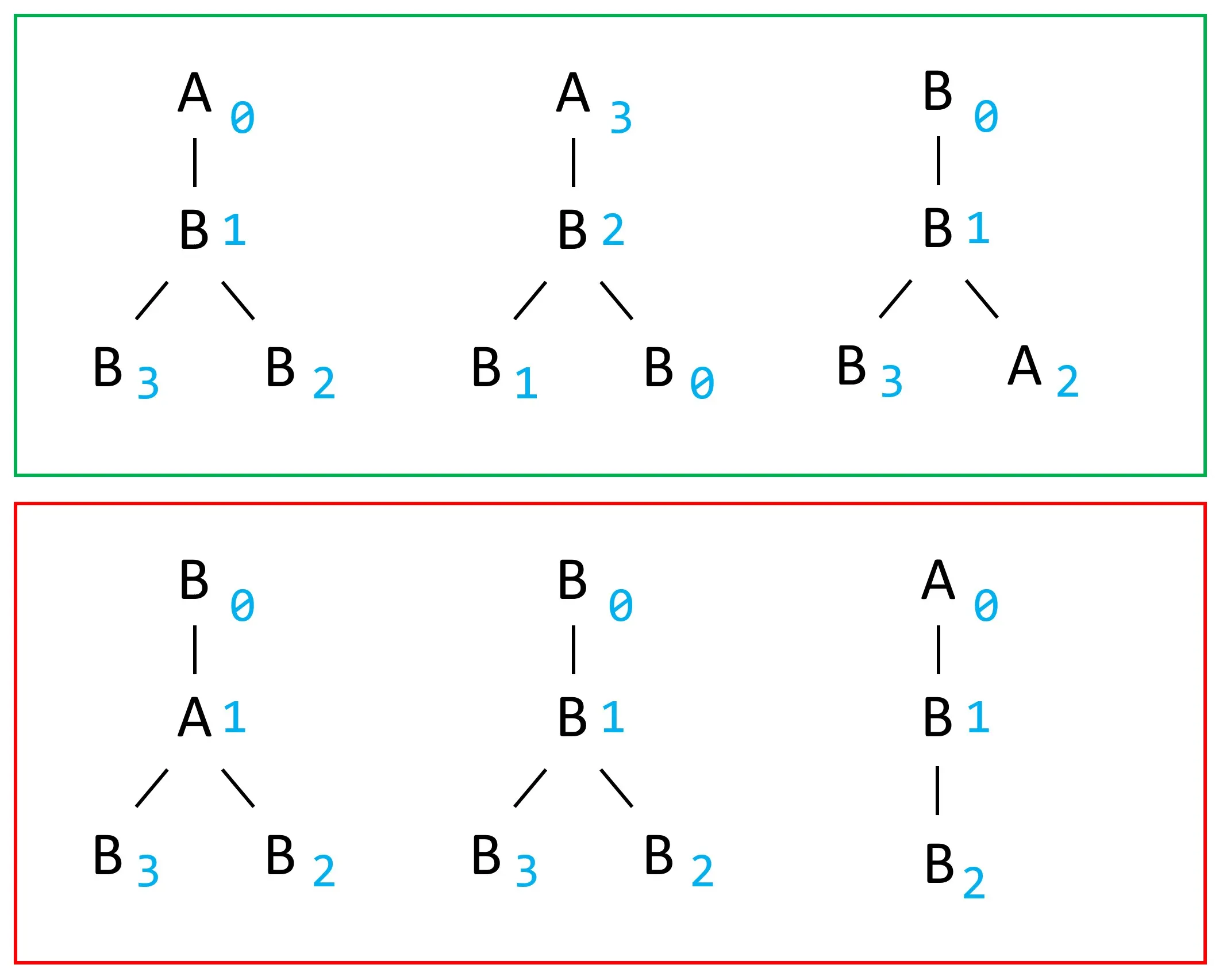
现在你可以用代码来表述问题:
Problem green = {{{A, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, A}, {{3, 2}, {2, 0}, {3, 1}}},
{{B, B, B, A}, {{0, 1}, {1, 2}, {1, 3}}}};
Problem red = {{{B, A, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{A, B, B}, {{0, 1}, {1, 2}}}};
Note
Close inspection turns up multiple errors in that representation, so I'll be using my own fixed representation:
Problem green = {{{A, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, A}, {{3, 2}, {2, 0}, {2, 1}}},
{{B, B, A, B}, {{0, 1}, {1, 2}, {1, 3}}}};
Problem red = {{{B, A, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{A, B, B}, {{0, 1}, {1, 2}}}};
让我们来实现我们的解决方案:
Graph toGraph(Input const& input);
bool compare(Graph const& a, Graph const& b);
bool solve(Problem const& p);
实际上,toGraph 是一个一对一的辅助方法,用于将输入转换为邻接表:
Graph toGraph(Input const& input) {
auto N = input.nodes.size();
Graph g(begin(input.bonds), end(input.bonds), N);
for (size_t n = 0; n < N; ++n)
g[n].type = input.nodes.at(n);
return g;
}
compare 只是像以前一样包装了对 isomorphism 的调用:
bool compare(Graph const& a, Graph const& b) {
auto n = num_vertices(a);
std::vector<V> f(n);
bool ok =
(n == num_vertices(b))
&& isomorphism(a, b, boost::isomorphism_map(f.data()));
debug << "isomorphism " << std::boolalpha << ok;
if (ok)
for (debug << " f: "; auto v : f)
debug << v << " ";
debug << std::endl;
return ok;
}
“我不赞成将输出与逻辑混合在一起,但这可能有助于说明答案,因此我将其留在可以启用的“debug”流下面。”
“现在,解决问题可以通过比较问题中所有图形对来完成:”
bool solve(Problem const& p) {
std::vector<Graph> gg;
transform(begin(p), end(p), back_inserter(gg), toGraph);
assert(gg.size() == 3);
return compare(gg[0], gg[1]) && compare(gg[1], gg[2]);
}
实际上,我还会添加调试输出来验证图表:
for (auto& g : gg) {
auto name = make_transform_value_property_map(
[&](V v) { return "AB"[g[v].type] + std::to_string(v); }, get(boost::vertex_index, g));
print_graph(g, name, debug << " --\n");
}
当然,我们不是没有理由地将问题设置为动态大小的,所以让我们使用算法进行泛化:
bool solve(Problem const& p) {
std::vector<Graph> gg;
transform(begin(p), end(p), back_inserter(gg), toGraph);
for (auto& g : gg) {
auto name = make_transform_value_property_map(
[&](V v) { return "AB"[g[v].type] + std::to_string(v); }, get(boost::vertex_index, g));
print_graph(g, name, debug << " --\n");
}
auto mismatch = [](Graph const& a, Graph const& b) { return !compare(a, b); };
return end(gg) == adjacent_find(begin(gg), end(gg), mismatch);
}
演示时间
在 Coliru 上实时演示
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/graph_utility.hpp>
#include <boost/graph/isomorphism.hpp>
#include <boost/property_map/transform_value_property_map.hpp>
#include <iostream>
static std::ostream debug(nullptr);
enum Type { A, B };
struct Node {
Type type;
};
using Graph = boost::adjacency_list<boost::vecS, boost::vecS, boost::undirectedS, Node>;
using V = Graph::vertex_descriptor;
using Bond = std::pair<V, V>;
struct Input {
std::vector<Type> nodes;
std::vector<Bond> bonds;
};
using Problem = std::vector<Input>;
Graph toGraph(Input const& input) {
auto N = input.nodes.size();
Graph g(begin(input.bonds), end(input.bonds), N);
for (size_t n = 0; n < N; ++n)
g[n].type = input.nodes.at(n);
return g;
}
bool compare(Graph const& a, Graph const& b) {
auto n = num_vertices(a);
std::vector<V> f(n);
bool ok =
(n == num_vertices(b))
&& isomorphism(a, b, boost::isomorphism_map(f.data()));
debug << "isomorphism " << std::boolalpha << ok;
if (ok)
for (debug << " f: "; auto v : f)
debug << v << " ";
debug << std::endl;
return ok;
}
bool solve(Problem const& p) {
std::vector<Graph> gg;
transform(begin(p), end(p), back_inserter(gg), toGraph);
for (auto& g : gg) {
auto name = make_transform_value_property_map(
[&](V v) { return "AB"[g[v].type] + std::to_string(v); }, get(boost::vertex_index, g));
print_graph(g, name, debug << " --\n");
}
auto mismatch = [](Graph const& a, Graph const& b) { return !compare(a, b); };
return end(gg) == adjacent_find(begin(gg), end(gg), mismatch);
}
int main() {
debug.rdbuf(std::cout.rdbuf());
debug << "green ---\n";
bool ok = solve({{{A, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, A}, {{3, 2}, {2, 0}, {2, 1}}},
{{B, B, A, B}, {{0, 1}, {1, 2}, {1, 3}}}});
std::cout << " -> green problem solves " << std::boolalpha << ok << std::endl;
debug << "red ---\n";
ok = solve({{{B, A, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{A, B, B}, {{0, 1}, {1, 2}}}});
std::cout << " -> red problem solves " << std::boolalpha << ok << std::endl;
}
打印
green
A0 <
B1 <
B2 <
B3 <
B0 <
B1 <
B2 <
A3 <
B0 <
B1 <
A2 <
B3 <
isomorphism true f: 3 2 0 1
isomorphism true f: 2 3 1 0
-> green problem solves true
red
B0 <
A1 <
B2 <
B3 <
B0 <
B1 <
B2 <
B3 <
A0 <
B1 <
B2 <
isomorphism true f: 0 1 2 3
isomorphism false
-> red problem solves false
或者,禁用调试 只需打印:
-> 绿色问题解决为真
-> 红色问题解决为假
还有什么疑问吗?
我很高兴指出,这个最终程序通过广泛的调试输出解决了整个两个问题,在比你开始的示例少 10行代码 的情况下。
请注意,你在问题中提到:
我想要获取同构的图形(尊重类型 - A/B)_
现在不清楚你的意思。你似乎期望绿色框匹配,但很明显第三个图形不会与“尊重类型-A/B”匹配吧?如果你需要这个,你需要包含相应的顶点不变量
奖励:节点类型不变量
需要仔细观察才能意识到“尊重类型”实际上并不与预期结果冲突。因此,这里有一个只关注节点类型的不变量:
struct Invariant {
Graph const& g;
using result_type = int;
using argument_type = V;
static int max() { return 2; }
Type operator()(V v) const { return g[v].type; };
};
bool ok = (n == num_vertices(b)) &&
isomorphism(a, b,
boost::isomorphism_map(f.data())
.vertex_max_invariant(2)
.vertex_invariant1(Invariant{a})
.vertex_invariant2(Invariant{b}));
然而,停留在那里可能是一个很大的错误(特别是如果你的图可以变得更大)。这是因为默认的不变量匹配节点度数,这可以是一个巨大的优化。将启发式与类型要求相结合:
size_t max_inv = 2 * num_vertices(a) * num_vertices(b);
struct Invariant {
Graph const& g;
size_t const max_;
using argument_type = V;
using result_type = size_t;
result_type max() const { return max_; }
result_type operator()(argument_type v) const { return static_cast<int>(g[v].type) * degree(v, g); }
};
bool ok = (n == num_vertices(b)) &&
isomorphism(a, b,
boost::isomorphism_map(f.data())
.vertex_invariant1(Invariant{a, max_inv})
.vertex_invariant2(Invariant{b, max_inv}));
虽然不太美观,但它能正常工作!注意我如何改进同构映射的调试输出,以便我甚至能理解这些映射 :)
在 Coliru 上实时运行
#include <boost/graph/adjacency_list.hpp>
#include <boost/graph/graph_utility.hpp>
#include <boost/graph/isomorphism.hpp>
#include <boost/property_map/transform_value_property_map.hpp>
#include <iostream>
using boost::make_iterator_range;
static std::ostream debug(nullptr);
enum Type { A, B };
struct Node { Type type; };
using Graph = boost::adjacency_list<boost::vecS, boost::vecS, boost::undirectedS, Node>;
using V = Graph::vertex_descriptor;
using Bond = std::pair<V, V>;
struct Input {
std::vector<Type> nodes;
std::vector<Bond> bonds;
};
using Problem = std::vector<Input>;
Graph toGraph(Input const& input) {
auto N = input.nodes.size();
Graph g(begin(input.bonds), end(input.bonds), N);
for (size_t n = 0; n < N; ++n)
g[n].type = input.nodes.at(n);
return g;
}
static auto names(Graph const& g) {
return make_transform_value_property_map([&](V v) { return "AB"[g[v].type] + std::to_string(v); },
get(boost::vertex_index, g));
}
bool compare(Graph const& a, Graph const& b) {
auto n = num_vertices(a);
std::vector<V> f(n);
size_t max_inv = 2 * num_vertices(a) * num_vertices(b);
struct Invariant {
Graph const& g;
size_t const max_;
using argument_type = V;
using result_type = size_t;
result_type max() const { return max_; }
result_type operator()(argument_type v) const { return static_cast<int>(g[v].type) * degree(v, g); }
};
bool ok = (n == num_vertices(b)) &&
isomorphism(a, b,
boost::isomorphism_map(f.data())
.vertex_invariant1(Invariant{a, max_inv})
.vertex_invariant2(Invariant{b, max_inv}));
debug << "isomorphism " << std::boolalpha << ok;
if (auto an = names(a), bn = names(b); ok)
for (debug << " f: "; V v : make_iterator_range(vertices(a)))
debug << an[v] << "->" << bn[f[v]] << " ";
debug << std::endl;
return ok;
}
bool solve(Problem const& p) {
std::vector<Graph> gg;
transform(begin(p), end(p), back_inserter(gg), toGraph);
for (auto& g : gg)
print_graph(g, names(g), debug << " --\n");
auto mismatch = [](Graph const& a, Graph const& b) { return !compare(a, b); };
return end(gg) == adjacent_find(begin(gg), end(gg), mismatch);
}
int main() {
debug.rdbuf(std::cout.rdbuf());
debug << "green ---\n";
bool ok = solve({{{A, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, A}, {{3, 2}, {2, 0}, {2, 1}}},
{{B, B, A, B}, {{0, 1}, {1, 2}, {1, 3}}}});
std::cout << " -> green problem solves " << std::boolalpha << ok << std::endl;
debug << "red ---\n";
ok = solve({{{B, A, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{B, B, B, B}, {{0, 1}, {1, 2}, {1, 3}}},
{{A, B, B}, {{0, 1}, {1, 2}}}});
std::cout << " -> red problem solves " << std::boolalpha << ok << std::endl;
}
打印
green
A0 <
B1 <
B2 <
B3 <
B0 <
B1 <
B2 <
A3 <
B0 <
B1 <
A2 <
B3 <
isomorphism true f: A0->A3 B1->B2 B2->B0 B3->B1
isomorphism true f: B0->B0 B1->B3 B2->B1 A3->A2
-> green problem solves true
red
B0 <
A1 <
B2 <
B3 <
B0 <
B1 <
B2 <
B3 <
A0 <
B1 <
B2 <
isomorphism false
-> red problem solves false
{kind=link}