我正在使用
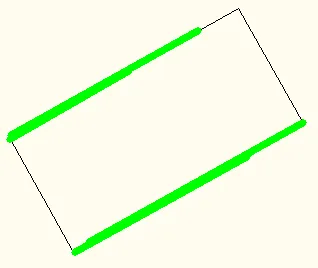
结果:
cv2.HoughLinesP()函数,它会返回检测到的直线。这些直线大多数情况下能够准确地找到物体的角度。然后,我想根据这些直线旋转原始图像。
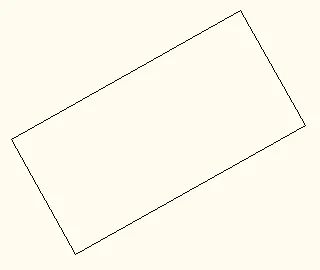
我的图片:
import cv2 as cv
import numpy as np
img = cv.imread(img)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray,50,150,apertureSize = 3)
lines = cv.HoughLinesP(edges,1,np.pi/180,100,minLineLength=100,maxLineGap=10)
for line in lines:
x1,y1,x2,y2 = line[0]
cv.line(img,(x1,y1),(x2,y2),(0,255,0),5)
cv2.imshow('', img)
cv2.waitKey()
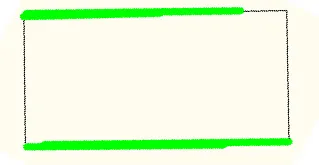
结果: