我正在使用STM32F4和其SPI与74HC595通信,就像这个教程中所示。区别在于,为了简单起见,我使用的是非DMA版本。我使用STMCubeMX配置了SPI和GPIO。
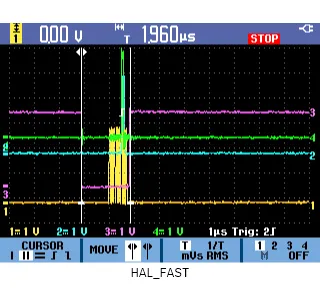
问题是:我没有快速获取设置为PA8的锁存引脚的切换信号。
问题是:我没有快速获取设置为PA8的锁存引脚的切换信号。
spiTxBuf[0] = 0b00000010;
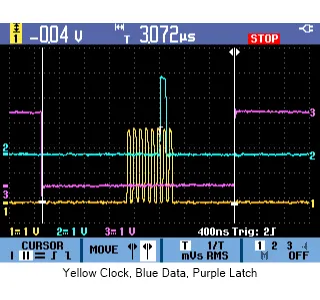
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_SPI_Transmit(&hspi1, spiTxBuf, 1, HAL_MAX_DELAY);
// while(HAL_SPI_GetState(&hspi1) != HAL_SPI_STATE_READY);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_8, GPIO_PIN_SET);
HAL_Delay(1);
尝试的方法:
将引脚PA8的最大输出速度设置为非常快

等待SPI完成(见上面的注释行)
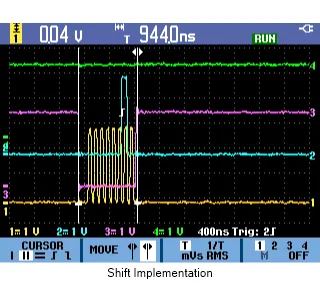
- 像这里一样使用DMA来进行SPI,但实际上速度更慢。
我该如何使其切换速度更快? 是否应该创建一个中断,当SPI完成时设置门闩?