我正在尝试实现一个状态空间图的深度优先迭代加深搜索算法。我的图有三个顶点,其中有两条激活边和两条抑制边。每个节点都有一个二进制值,这是图形的状态。通过查看一个节点是否高于或低于阈值(从所有传入节点的总和计算)可以将图转换为新状态。每次转换最多只会更改一个节点。由于有三个节点,因此每个状态在状态转换图中都有三个状态转换边。 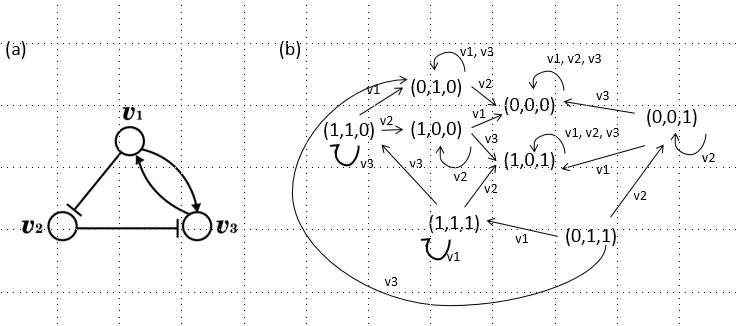 我认为我的state_change/3函数工作得很好,例如我可以查询:
我认为我的state_change/3函数工作得很好,例如我可以查询:
我正在尝试使用Bratkos Prolog for A.I书中提供的谓词id_path解决11.3问题,但我在使用/调整时遇到了问题。 我想创建一条从起始节点到其他节点的路径,而不会陷入循环-我不希望它有重复元素或在不存在路径时卡住。 我希望路径显示起始状态,然后是可以从起始状态访问的一系列状态。如果存在自环,我希望每种方法都包括一次。也就是说,我想跟踪到达状态空间的方式,并使其唯一,而不仅仅是路径中状态空间的唯一性。
例如,对于011,我希望找到所有长度为1的三条路径及其弧。
我认为我的state_change/3函数工作得很好,例如我可以查询:?-g_s_s(0,1,1,Begin),node(Arc),state_change(g_s(Begin),Second,Arc).
并且它给出了我三个正确答案:
Begin = [node(v1, 0), node(v2, 1), node(v3, 1)],
Arc = v1,
Second = g_s([node(v1, 1), node(v2, 1), node(v3, 1)]) ;
Begin = [node(v1, 0), node(v2, 1), node(v3, 1)],
Arc = v2,
Second = g_s([node(v1, 0), node(v2, 0), node(v3, 1)]) ;
Begin = [node(v1, 0), node(v2, 1), node(v3, 1)],
Arc = v3,
Second = g_s([node(v1, 0), node(v2, 1), node(v3, 0)])
我正在尝试使用Bratkos Prolog for A.I书中提供的谓词id_path解决11.3问题,但我在使用/调整时遇到了问题。 我想创建一条从起始节点到其他节点的路径,而不会陷入循环-我不希望它有重复元素或在不存在路径时卡住。 我希望路径显示起始状态,然后是可以从起始状态访问的一系列状态。如果存在自环,我希望每种方法都包括一次。也就是说,我想跟踪到达状态空间的方式,并使其唯一,而不仅仅是路径中状态空间的唯一性。
例如,对于011,我希望找到所有长度为1的三条路径及其弧。
?-id_path(g_s([node(v1,0),node(v2,1),node(v3,1)],Last,[Temp],Path).
Path = [[node(v1,0),node(v2,1),node(v3,1)],to([node(v1,1),node(v2,1),node(v3,1)],v1)];
Path =[[node(v1,0),node(v2,1),node(v3,1)], to([node(v1,0),node(v2,0),node(v3,1)],v2)];
Path=[[node(v1,0),node(v2,1),node(v3,1)],to([node(v1,1),node(v2,1),node(v3,0)],v3)];
然后,在下一层,显示具有三个节点的所有路径,显示到达节点所需的两个弧,然后在下一层,显示具有四个节点的所有路径,显示需要三个弧等
如果有帮助的话,我也已将我的代码放在SWISH中?(这是第一次尝试?!)
http://pengines.swi-prolog.org/apps/swish/p/HxBzEwLb.pl#&togetherjs=xydMBkFjQR
a(v1,v3). %a activating edge
a(v3,v1).
i(v1,v2). %a inhibition edge
i(v2,v3).
nodes([v1,v2,v3]).
node(X):- nodes(List),member(X,List). %to retrieve a node in graph a) or an arc in graph b)
g_s_s(X,Y,Z,g_s([node(v1,X),node(v2,Y),node(v3,Z)])). %graph_state_simple - I use this to simply set a starting graph state.
sum_list([], 0).
sum_list([H|T], Sum) :-
sum_list(T, Rest),
Sum is H + Rest.
invert(1,0).
invert(0,1).
state_of_node(Node,g_s(List),State):-
member(node(Node,State),List).
%all activating nodes in a graph state for a node
all_a(Node,As,Ss,g_s(NodeList)):-
findall(A, a(A,Node),As),
findall(S,(member(M,As),member(node(M,S),NodeList)),Ss).
%all inhibiting nodes in a graph state for a node
all_i(Node,Is,Ss,g_s(NodeList)):-
findall(I, i(I,Node),Is),
findall(S,(member(M,Is),member(node(M,S),NodeList)),Ss).
%sum of activating nodes of a node in a state
sum_a(Node,g_s(NodeList),Sum):-
all_a(Node,_As,Ss,g_s(NodeList)),
sum_list(Ss,Sum).
%sum of inhibiting nodes of a node in a state
sum_i(Node,g_s(NodeList),Sum):-
all_i(Node,_Is,Ss,g_s(NodeList)),
sum_list(Ss,Sum).
above_threshold(Threshold,Node,g_s(NodeList),TrueFalse):-
sum_a(Node,g_s(NodeList),Sum_A),
sum_i(Node,g_s(NodeList),Sum_I),
TrueFalse = true,
Threshold < (Sum_A-Sum_I),
!.
above_threshold(Threshold,Node,g_s(NodeList),TrueFalse):-
sum_a(Node,g_s(NodeList),Sum_A),
sum_i(Node,g_s(NodeList),Sum_I),
TrueFalse = false,
Threshold >= (Sum_A-Sum_I).
%arc needs to be instantiated
state_change(g_s(State1),g_s(State1),Arc):-
above_threshold(0,Arc,g_s(State1),true),
state_of_node(Arc,g_s(State1),1).
state_change(g_s(State1),g_s(State2),Arc):-
above_threshold(0,Arc,g_s(State1),false),
state_of_node(Arc,g_s(State1),1),
my_map(State1,State2,Arc).
state_change(g_s(State1),g_s(State2),Arc):-
above_threshold(0,Arc,g_s(State1),true),
state_of_node(Arc,g_s(State1),0),
my_map(State1,State2,Arc).
state_change(g_s(State1),g_s(State1),Arc):-
above_threshold(0,Arc,g_s(State1),false),
state_of_node(Arc,g_s(State1),0).
%
my_map([],[],_).
my_map([X|T],[Y|L],Arc):-
X= node(Node,Value1),
Node =Arc,
invert(Value1,Value2),
Y = node(Node,Value2),
my_map(T,L,Arc).
my_map([X|T],[Y|L],Arc):-
X= node(Node,Value1),
Node \= Arc,
Y = node(Node,Value1),
my_map(T,L,Arc).
%this is the def in the book which I can not adapt.
path(Begin,Begin,[start(Begin)]).
path(First, Last,[First,Second|Rest]):-
state_change(First,Second,Arc),
path(Second,Last,[Second|Rest]).
%this is the def in the book which I can not adapt.
id_path(First,Last,Template,Path):-
Path = Template,
path(First,Last,Path)
; copy_term(Template,P),
path(First,_,P),
!,
id_path(First,Last,[_|Template],Path).
id_path/4调用了path/3,但除了它自己(递归调用)之外,没有任何东西调用id_path/4。因此,如果path/3不起作用,让我们从那里开始,稍后再回到id_path/4。 - hardmathpath(First,First,[First]). path(First,Last,[First,Second|Rest]):- state_change(First,Second,Arc), path(Second,Last,[Second|Rest]), append([Arc], Rest, NewRest).我的不同之处在于,我等价于 s/2 的是 state_change/3,其中我还想将弧放入找到的路径的状态空间图中。 - user27815path/3是找不到你想要的路径,找到你不想要的路径,还是以其他方式(如陷入无限循环)表现不良? - hardmath