我正在寻找一个算法,用于确定两个点(p1,p2)在已知速度下绕圆移动时,从它们之间较小的弧的角度来看,它们之间的距离是增加还是减少。
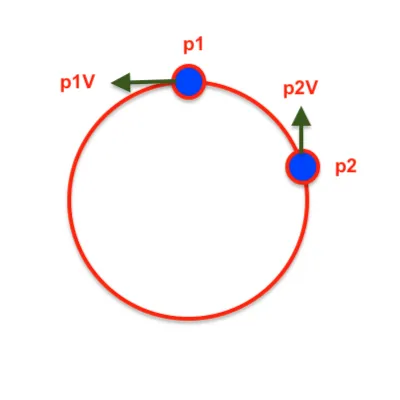
- 我知道p1和p2在度数/弧度上的位置。
- 我知道两个物体的速度(piV,p2V)是在一个均匀的比例尺上的。
- 我知道p1和p2之间短弧的绝对值,以度数/弧度表示(始终为正值)。但是,如果有帮助的话,我也可以知道短弧作为负值或正值,从p1的角度来看,当p2在后面(右侧)时为负,如果p2在前面(左侧),则为正。
- 当它们逆时针移动时,速度为正,当它们“逆行”(顺时针移动)时,速度为负。