我正在测试射线是否与三角形相交。目前,我使用以下代码测试三角形和从原点到三角形中点的射线之间是否存在相交:
Ray<float> *ray = new Ray<float>(Vec3<float>(0), chosenTriangle->GetTriangleMidpoint());
这里是我用来存储向量运算的Vec3对象:
template<typename T>
class Vec3
{
public:
T x, y, z;
Vec3() : x(T(0)), y(T(0)), z(T(0)) { }
Vec3(T xx) : x(xx), y(xx), z(xx) { }
Vec3(T xx, T yy, T zz) : x(xx), y(yy), z(zz) {}
Vec3& normalize()
{
T nor2 = length2();
if (nor2 > 0) {
T invNor = 1 / sqrt(nor2);
x *= invNor, y *= invNor, z *= invNor;
}
return *this;
}
Vec3<T> operator * (const T &f) const { return Vec3<T>(x * f, y * f, z * f); }
Vec3<T> operator * (const Vec3<T> &v) const { return Vec3<T>(x * v.x, y * v.y, z * v.z); }
T dot(const Vec3<T> &v) const { return x * v.x + y * v.y + z * v.z; }
Vec3<T> operator - (const Vec3<T> &v) const { return Vec3<T>(x - v.x, y - v.y, z - v.z); }
Vec3<T> operator + (const Vec3<T> &v) const { return Vec3<T>(x + v.x, y + v.y, z + v.z); }
bool operator == (const Vec3<T> &v) { return x == v.x && y == v.y && z == v.z; }
Vec3<T> operator - () const { return Vec3<T>(-x, -y, -z); }
T length2() const { return x * x + y * y + z * z; }
T length() const { return sqrt(length2()); }
Vec3<T> CrossProduct(Vec3<T> other)
{
return Vec3<T>(y*other.z - other.y*z, x*other.z - z*other.x, x*other.y - y*other.x);
}
friend std::ostream & operator << (std::ostream &os, const Vec3<T> &v)
{
os << "[" << v.x << " " << v.y << " " << v.z << "]";
return os;
}
选定的三角形和光线具有以下值,其中
vertA,vertB和vertC是三角形的顶点,并且在表示三角形的对象中找到。
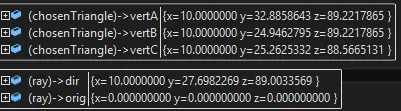
vertA,vertB和vertC是全局变量。bool CheckRayIntersection(Vec3<T> &o, Vec3<T> &d)
{
Vec3<T> e1 = vertB - vertA;
Vec3<T> e2 = vertC - vertA;
Vec3<T> p = d.CrossProduct(e2);
T a = e1.dot(p);
if(a == 0)
return false;
float f = 1.0f/a;
Vec3<T> s = o - vertA;
T u = f * s.dot(p);
if(u < 0.0f || u > 1.0f)
return false;
Vec3<T> q = s.CrossProduct(e1);
T v = f * d.dot(q);
if(v < 0.0f || u+v > 1.0f)
return false;
T t = f * e2.dot(q);
return (t >= 0);
}
我仍然从函数得到了一个错误的返回值,但我认为它应该返回true,因为通过三角形中点的向量应该在三角形中点处相交。有人可以告诉我我的代码哪里有问题吗?或者错误的返回false实际上是正确的吗?
Vec3方法可能有误,因为你的实现具有我所提到的那个方法的“形状”。 - Rerito