我正在尝试在一张图片中找到四个角落,不需要轮廓,只需要4个角落。我将使用这4个角落来改变透视。
我正在使用Opencv,但是我需要知道如何找到这些角落的步骤和要使用的函数。
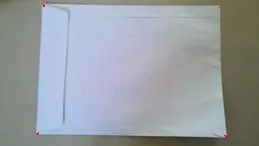
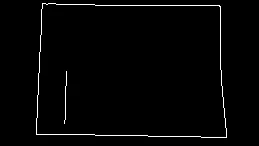
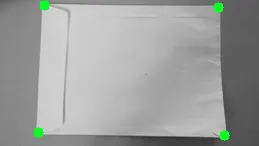
我的图片将是这样的:(没有红色点,我会在之后涂上这些点)

编辑:
按照建议的步骤,我写下了代码:(注意:我并没有使用纯OpenCV,而是使用javaCV,但是逻辑相同)。
// Load two images and allocate other structures (I´m using other image)
IplImage colored = cvLoadImage(
"res/scanteste.jpg",
CV_LOAD_IMAGE_UNCHANGED);

IplImage gray = cvCreateImage(cvGetSize(colored), IPL_DEPTH_8U, 1);
IplImage smooth = cvCreateImage(cvGetSize(colored), IPL_DEPTH_8U, 1);
//Step 1 - Convert from RGB to grayscale (cvCvtColor)
cvCvtColor(colored, gray, CV_RGB2GRAY);
//2 Smooth (cvSmooth)
cvSmooth( gray, smooth, CV_BLUR, 9, 9, 2, 2);
//3 - cvThreshold - What values?
cvThreshold(gray,gray, 155, 255, CV_THRESH_BINARY);
//4 - Detect edges (cvCanny) -What values?
int N = 7;
int aperature_size = N;
double lowThresh = 20;
double highThresh = 40;
cvCanny( gray, gray, lowThresh*N*N, highThresh*N*N, aperature_size );

//5 - Find contours (cvFindContours)
int total = 0;
CvSeq contour2 = new CvSeq(null);
CvMemStorage storage2 = cvCreateMemStorage(0);
CvMemStorage storageHull = cvCreateMemStorage(0);
total = cvFindContours(gray, storage2, contour2, Loader.sizeof(CvContour.class), CV_RETR_CCOMP, CV_CHAIN_APPROX_NONE);
if(total > 1){
while (contour2 != null && !contour2.isNull()) {
if (contour2.elem_size() > 0) {
//6 - Approximate contours with linear features (cvApproxPoly)
CvSeq points = cvApproxPoly(contour2,Loader.sizeof(CvContour.class), storage2, CV_POLY_APPROX_DP,cvContourPerimeter(contour2)*0.005, 0);
cvDrawContours(gray, points,CvScalar.BLUE, CvScalar.BLUE, -1, 1, CV_AA);
}
contour2 = contour2.h_next();
}
}

我想找到图像的角点,但是我不知道如何使用诸如cvCornerHarris等函数来查找角点。