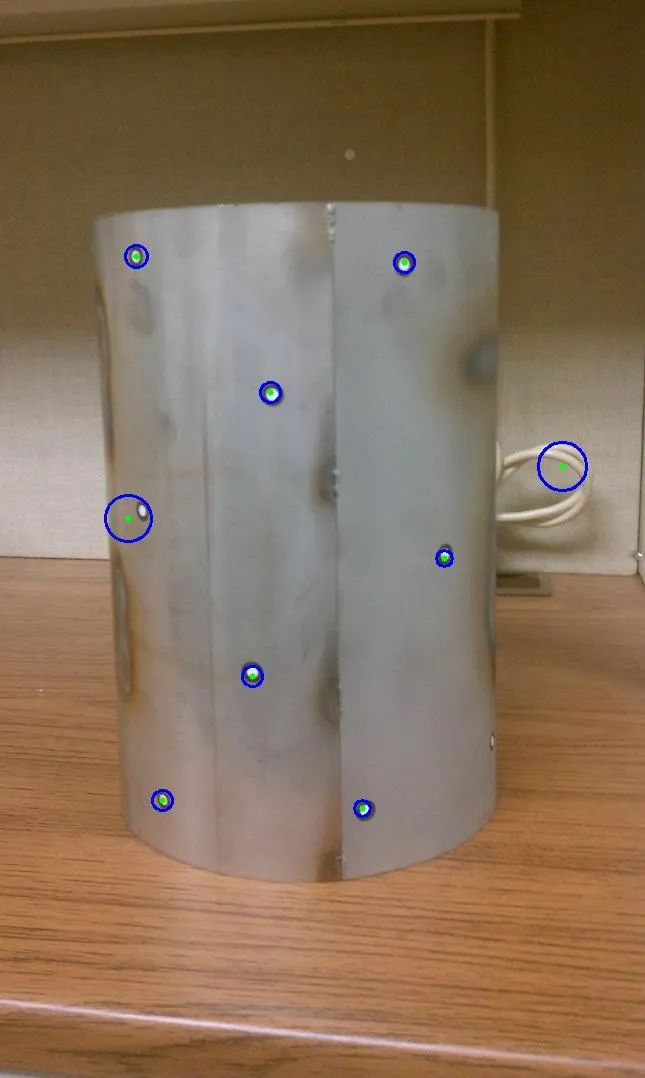
我正在尝试检测黑白点目标的中心,就像这张图片中一样。我尝试使用cv2.HoughCircles方法,但是只能检测到2到3个目标,并且当我将找到的圆形绘制回图像时,它们总是稍微偏移。我是否使用了错误的方法?我应该使用findContours还是完全不同的方法?以下是我的代码:
import cv2
from cv2 import cv
import os
import numpy as np
def showme(pic):
cv2.imshow('window',pic)
cv2.waitKey()
cv2.destroyAllWindows()
im=cv2.imread('small_test.jpg')
gray=cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
#I've tried blur,bw,tr... all give me poor results.
blur = cv2.GaussianBlur(gray,(3,3),0)
n,bw = cv2.threshold(blur,120,255,cv2.THRESH_BINARY)
tr=cv2.adaptiveThreshold(blur,255,0,1,11,2)
circles = cv2.HoughCircles(gray, cv.CV_HOUGH_GRADIENT, 3, 100, None, 200, 100, 5, 16)
try:
n = np.shape(circles)
circles=np.reshape(circles,(n[1],n[2]))
print circles
for circle in circles:
cv2.circle(im,(circle[0],circle[1]),circle[2],(0,0,255))
showme(im)
except:
print "no cicles found"
这是我的当前输出: