我想在笔记本中玩OpenAI Gym,并行内渲染Gym。
这是一个基本的例子:
这是一个基本的例子:
import matplotlib.pyplot as plt
import gym
from IPython import display
%matplotlib inline
env = gym.make('CartPole-v0')
env.reset()
for i in range(25):
plt.imshow(env.render(mode='rgb_array'))
display.display(plt.gcf())
display.clear_output(wait=True)
env.step(env.action_space.sample()) # take a random action
env.close()
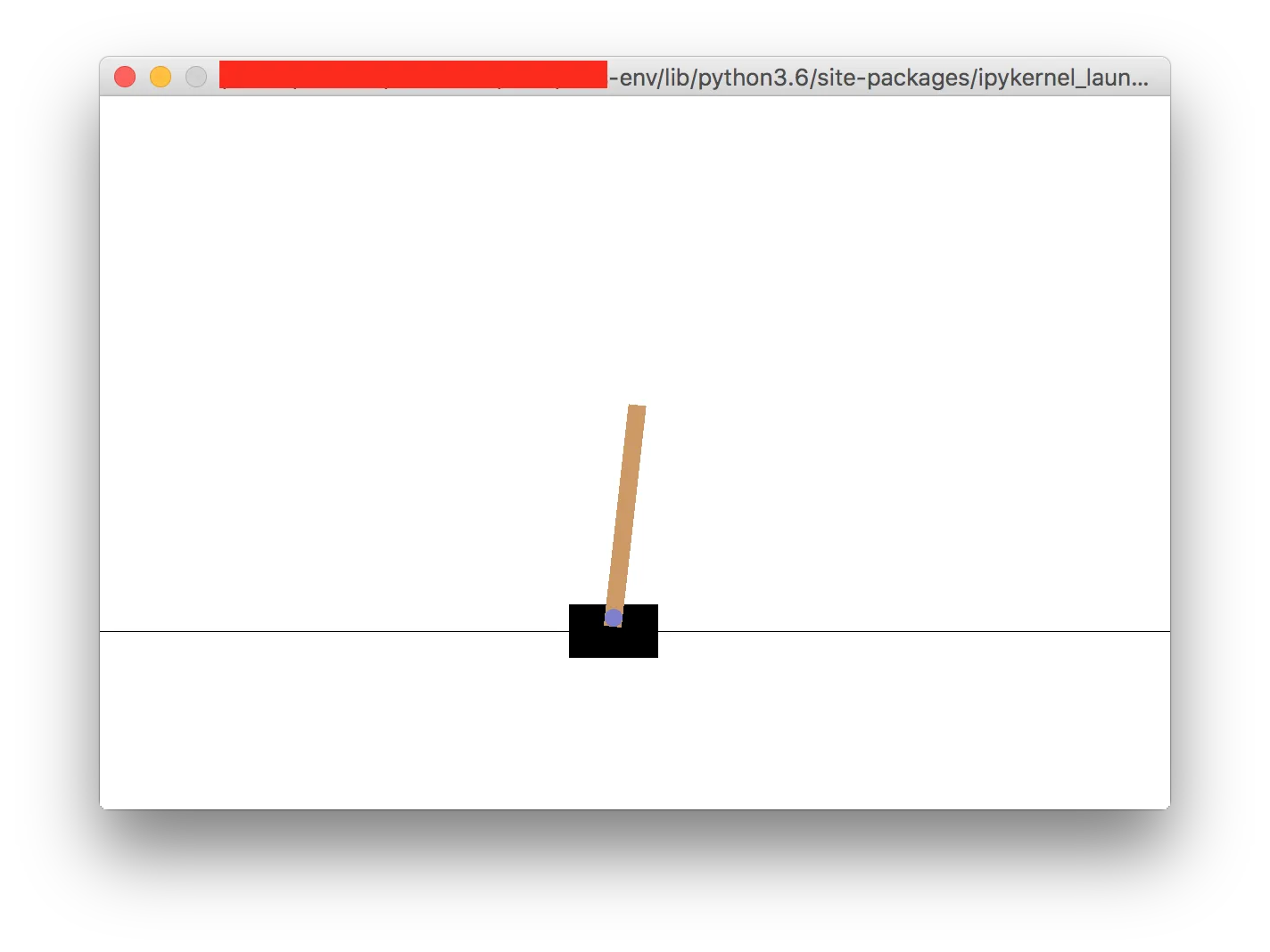
这个方法可行,并且我可以在笔记本电脑上看到健身房:
但是!它也会打开一个交互式窗口,显示完全相同的内容。我不想打开这个窗口:
env.reset()之后放置%matplotlib inline,是否会出现相同的行为?我对OpenAI gym不是很熟悉,但是env.reset()听起来可能会(潜在地)覆盖导入或其他内容... - Matt Messersmith