我正在寻找有关碰撞检测优化的信息。
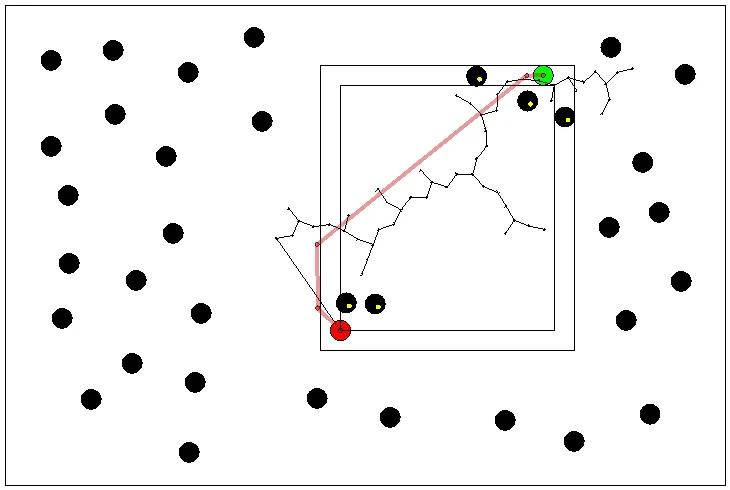
有一个物体(圆形)从点a移动到点b。该物体具有半径r,并且场中还有许多障碍物(圆形)。
我有一个算法(函数),用于检查圆形和胶囊体之间的碰撞,我目前为每个障碍物调用此函数:
许多障碍物与运动物体非常遥远,可以忽略使用碰撞检测功能进行检查。
我的问题是:
是否有一种解决方案可以忽略使用碰撞检测功能检查所有障碍物?例如最近邻搜索或KD树?
编辑:所有障碍物半径相同。
有一个物体(圆形)从点a移动到点b。该物体具有半径r,并且场中还有许多障碍物(圆形)。
我有一个算法(函数),用于检查圆形和胶囊体之间的碰撞,我目前为每个障碍物调用此函数:
for-each (o : obstacles)
if collide(o, Capsule(a,b,r))
return true;
return false;
许多障碍物与运动物体非常遥远,可以忽略使用碰撞检测功能进行检查。
我的问题是:
是否有一种解决方案可以忽略使用碰撞检测功能检查所有障碍物?例如最近邻搜索或KD树?
编辑:所有障碍物半径相同。