我基本上有一个类似以下的类:
class Stack {
...
push()
pop()
isEmpty()
...
class StackIterator extends Iterator {
...
hasNext()
next()
...
}
}
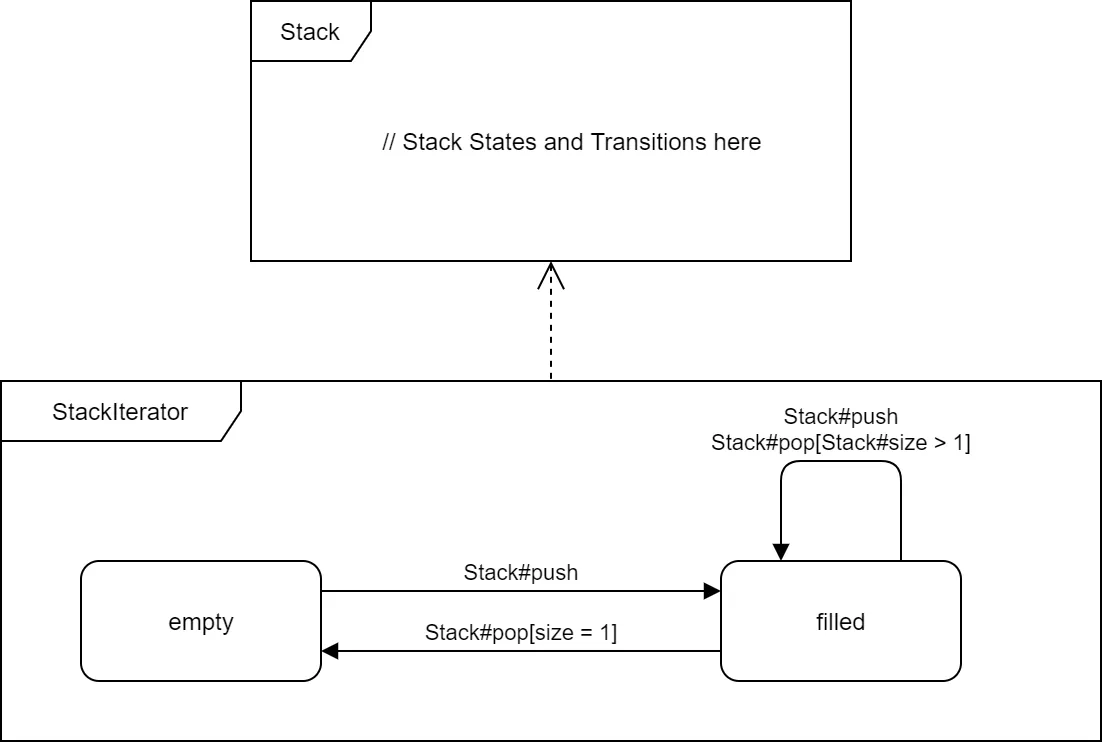
我希望为迭代器创建一个UML状态图。我的想法是使用依赖箭头和栈调用来模拟迭代器状态,如下所示: