当我还是个学生时,我在OpenCV示例文件夹中发现了
opencv/samples/cpp/stitching_detailed.cpp。当时,我的编程技能非常差。即使我费尽心思也无法理解它。这个问题吸引了我的注意,并唤起了我的记忆。
经过一整晚的努力和调试,我终于搞定了。
基本步骤:
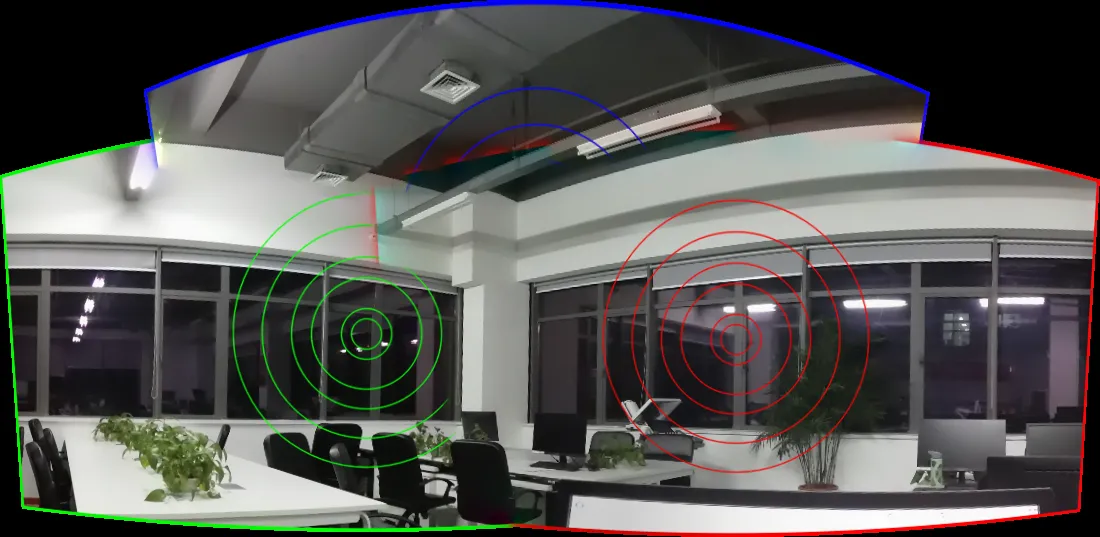
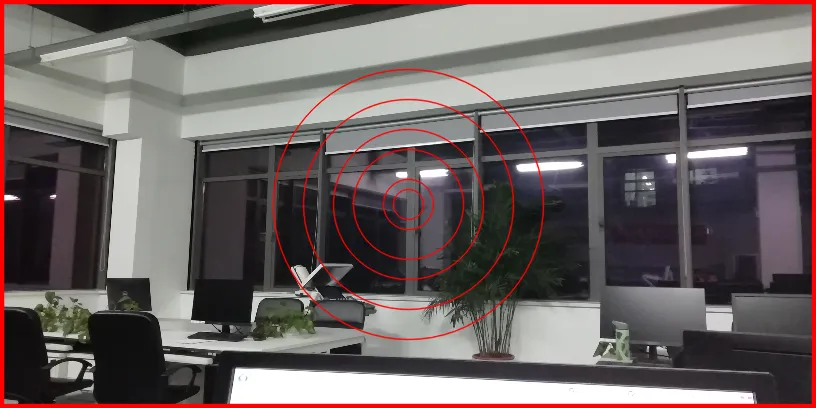
- 给定以下三张图片:blue.png,green.png和red.png

我们可以使用
stitching_detailed.cpp来获得拼接结果(
result.png)。
blender->blend(result, result_mask);
imwrite("result.png", result);
imwrite("result_mask.png", result_mask);
我会选择三张图片中的中心点,并计算出拼接图像上对应的坐标(经过变形),并以实线的形式绘制,如下所示:
- 我会选择三张图片中的中心点,并计算出拼接图像上对应的坐标(经过变形),并以实线的形式绘制,如下所示:
Warping images (auxiliary)...
Compensating exposure...
Blending ...
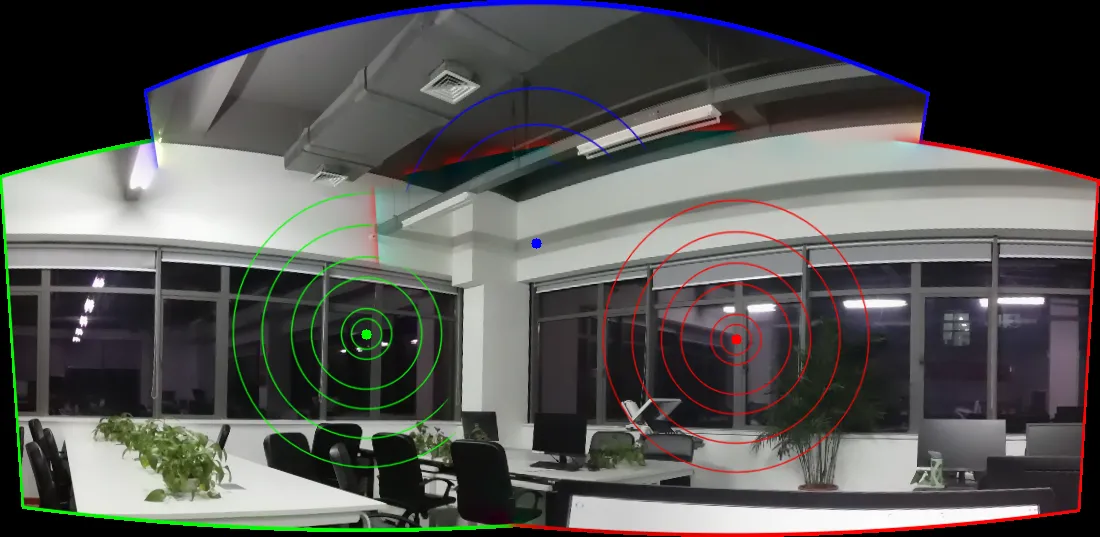
Warp each center point, and draw solid circle.
[408, 204] => [532, 224]
[408, 204] => [359, 301]
[408, 204] => [727, 320]
Check `result.png`, `result_mask.png` and `result2.png`!
Done!
这是我编写的用于计算拼接图像上变形点的函数
calcWarpedPoint:
cv::Point2f calcWarpedPoint(
const cv::Point2f& pt,
InputArray K,
InputArray R,
Ptr<RotationWarper> warper,
const std::vector<cv::Point> &corners,
const std::vector<cv::Size> &sizes)
{
cv::Point2f dst = warper->warpPoint(pt, K, R);
cv::Point2f tl = cv::detail::resultRoi(corners, sizes).tl();
return cv::Point2f(dst.x - tl.x, dst.y - tl.y);
}
这是一个示例代码片段:
std::cout << "\nWarp each center point, and draw solid circle.\n";
std::vector<cv::Scalar> colors = { {255,0,0}, {0, 255, 0}, {0, 0, 255} };
for (int idx = 0; idx < img_names.size(); ++idx) {
img = cv::imread(img_names[idx]);
Mat K;
cameras[idx].K().convertTo(K, CV_32F);
Mat R = cameras[idx].R;
cv::Point2f cpt = cv::Point2f(img.cols / 2, img.rows / 2);
cv::Point pt = calcWarpedPoint(cpt, K, R, warper, corners, sizes);
cv::circle(result, pt, 5, colors[idx], -1, cv::LINE_AA);
std::cout << cpt << " => " << pt << std::endl;
}
std::cout << "\nCheck `result.png`, `result_mask.png` and `result2.png`!\n";
imwrite("result2.png", result);
完整代码:
#include <iostream>
#include <fstream>
#include <string>
#include "opencv2/opencv_modules.hpp"
#include <opencv2/core/utility.hpp>
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/stitching/detail/autocalib.hpp"
#include "opencv2/stitching/detail/blenders.hpp"
#include "opencv2/stitching/detail/camera.hpp"
#include "opencv2/stitching/detail/exposure_compensate.hpp"
#include "opencv2/stitching/detail/matchers.hpp"
#include "opencv2/stitching/detail/motion_estimators.hpp"
#include "opencv2/stitching/detail/seam_finders.hpp"
#include "opencv2/stitching/detail/warpers.hpp"
#include "opencv2/stitching/warpers.hpp"
using namespace std;
using namespace cv;
using namespace cv::detail;
vector<String> img_names = {"D:/stitching/blue.png", "D:/stitching/green.png", "D:/stitching/red.png"};
cv::Point2f calcWarpedPoint(
const cv::Point2f& pt,
InputArray K,
InputArray R,
Ptr<RotationWarper> warper,
const std::vector<cv::Point> &corners,
const std::vector<cv::Size> &sizes)
{
cv::Point2f dst = warper->warpPoint(pt, K, R);
cv::Point2f tl = cv::detail::resultRoi(corners, sizes).tl();
return cv::Point2f(dst.x - tl.x, dst.y - tl.y);
}
int main(int argc, char* argv[])
{
double work_megapix = 0.6;
double seam_megapix = 0.1;
double compose_megapix = -1;
float conf_thresh = 1.f;
float match_conf = 0.3f;
float blend_strength = 5;
int num_images = static_cast<int>(img_names.size());
if (num_images < 2)
{
std::cout << "Need more images\n";
return -1;
}
double work_scale = 1, seam_scale = 1, compose_scale = 1;
bool is_work_scale_set = false, is_seam_scale_set = false, is_compose_scale_set = false;
Ptr<Feature2D> finder = ORB::create();
Mat full_img, img;
vector<ImageFeatures> features(num_images);
vector<Mat> images(num_images);
vector<Size> full_img_sizes(num_images);
double seam_work_aspect = 1;
for (int i = 0; i < num_images; ++i)
{
full_img = imread(img_names[i]);
full_img_sizes[i] = full_img.size();
if (full_img.empty())
{
cout << "Can't open image " << img_names[i] << std::endl;
return -1;
}
if (!is_work_scale_set)
{
work_scale = min(1.0, sqrt(work_megapix * 1e6 / full_img.size().area()));
is_work_scale_set = true;
}
resize(full_img, img, Size(), work_scale, work_scale, INTER_LINEAR_EXACT);
if (!is_seam_scale_set)
{
seam_scale = min(1.0, sqrt(seam_megapix * 1e6 / full_img.size().area()));
seam_work_aspect = seam_scale / work_scale;
is_seam_scale_set = true;
}
computeImageFeatures(finder, img, features[i]);
features[i].img_idx = i;
std::cout << "Features in image #" << i + 1 << ": " << features[i].keypoints.size() << std::endl;
resize(full_img, img, Size(), seam_scale, seam_scale, INTER_LINEAR_EXACT);
images[i] = img.clone();
}
full_img.release();
img.release();
vector<MatchesInfo> pairwise_matches;
Ptr<FeaturesMatcher> matcher = makePtr<BestOf2NearestMatcher>(false, match_conf);
(*matcher)(features, pairwise_matches);
matcher->collectGarbage();
vector<int> indices = leaveBiggestComponent(features, pairwise_matches, conf_thresh);
vector<Mat> img_subset;
vector<String> img_names_subset;
vector<Size> full_img_sizes_subset;
for (size_t i = 0; i < indices.size(); ++i)
{
img_names_subset.push_back(img_names[indices[i]]);
img_subset.push_back(images[indices[i]]);
full_img_sizes_subset.push_back(full_img_sizes[indices[i]]);
}
images = img_subset;
img_names = img_names_subset;
full_img_sizes = full_img_sizes_subset;
num_images = static_cast<int>(img_names.size());
if (num_images < 2)
{
std::cout << "Need more images\n";
return -1;
}
Ptr<Estimator> estimator = makePtr<HomographyBasedEstimator>();
vector<CameraParams> cameras;
if (!(*estimator)(features, pairwise_matches, cameras))
{
cout << "Homography estimation failed.\n";
return -1;
}
for (size_t i = 0; i < cameras.size(); ++i)
{
Mat R;
cameras[i].R.convertTo(R, CV_32F);
cameras[i].R = R;
std::cout << "\nInitial camera intrinsics #" << indices[i] + 1 << ":\nK:\n" << cameras[i].K() << "\nR:\n" << cameras[i].R << std::endl;
}
Ptr<detail::BundleAdjusterBase> adjuster = makePtr<detail::BundleAdjusterRay>();
adjuster->setConfThresh(conf_thresh);
Mat_<uchar> refine_mask = Mat::zeros(3, 3, CV_8U);
refine_mask(0, 0) = 1;
refine_mask(0, 1) = 1;
refine_mask(0, 2) = 1;
refine_mask(1, 1) = 1;
refine_mask(1, 2) = 1;
adjuster->setRefinementMask(refine_mask);
if (!(*adjuster)(features, pairwise_matches, cameras))
{
cout << "Camera parameters adjusting failed.\n";
return -1;
}
vector<double> focals;
for (size_t i = 0; i < cameras.size(); ++i)
{
focals.push_back(cameras[i].focal);
}
sort(focals.begin(), focals.end());
float warped_image_scale;
if (focals.size() % 2 == 1)
warped_image_scale = static_cast<float>(focals[focals.size() / 2]);
else
warped_image_scale = static_cast<float>(focals[focals.size() / 2 - 1] + focals[focals.size() / 2]) * 0.5f;
std::cout << "\nWarping images (auxiliary)... \n";
vector<Point> corners(num_images);
vector<UMat> masks_warped(num_images);
vector<UMat> images_warped(num_images);
vector<Size> sizes(num_images);
vector<UMat> masks(num_images);
for (int i = 0; i < num_images; ++i)
{
masks[i].create(images[i].size(), CV_8U);
masks[i].setTo(Scalar::all(255));
}
Ptr<WarperCreator> warper_creator = makePtr<cv::CylindricalWarper>();
if (!warper_creator)
{
cout << "Can't create the warper \n";
return 1;
}
Ptr<RotationWarper> warper = warper_creator->create(static_cast<float>(warped_image_scale * seam_work_aspect));
for (int i = 0; i < num_images; ++i)
{
Mat_<float> K;
cameras[i].K().convertTo(K, CV_32F);
float swa = (float)seam_work_aspect;
K(0, 0) *= swa; K(0, 2) *= swa;
K(1, 1) *= swa; K(1, 2) *= swa;
corners[i] = warper->warp(images[i], K, cameras[i].R, INTER_LINEAR, BORDER_REFLECT, images_warped[i]);
sizes[i] = images_warped[i].size();
warper->warp(masks[i], K, cameras[i].R, INTER_NEAREST, BORDER_CONSTANT, masks_warped[i]);
}
vector<UMat> images_warped_f(num_images);
for (int i = 0; i < num_images; ++i)
images_warped[i].convertTo(images_warped_f[i], CV_32F);
std::cout << "Compensating exposure... \n";
Ptr<ExposureCompensator> compensator = ExposureCompensator::createDefault(ExposureCompensator::GAIN_BLOCKS);
if (dynamic_cast<BlocksCompensator*>(compensator.get()))
{
BlocksCompensator* bcompensator = dynamic_cast<BlocksCompensator*>(compensator.get());
bcompensator->setNrFeeds(1);
bcompensator->setNrGainsFilteringIterations(2);
bcompensator->setBlockSize(32, 32);
}
compensator->feed(corners, images_warped, masks_warped);
Ptr<SeamFinder> seam_finder = makePtr<detail::GraphCutSeamFinder>(GraphCutSeamFinderBase::COST_COLOR);
seam_finder->find(images_warped_f, corners, masks_warped);
images.clear();
images_warped.clear();
images_warped_f.clear();
masks.clear();
Mat img_warped, img_warped_s;
Mat dilated_mask, seam_mask, mask, mask_warped;
Ptr<Blender> blender;
double compose_work_aspect = 1;
for (int img_idx = 0; img_idx < num_images; ++img_idx)
{
full_img = imread(img_names[img_idx]);
if (!is_compose_scale_set)
{
is_compose_scale_set = true;
compose_work_aspect = compose_scale / work_scale;
warped_image_scale *= static_cast<float>(compose_work_aspect);
warper = warper_creator->create(warped_image_scale);
for (int i = 0; i < num_images; ++i)
{
cameras[i].focal *= compose_work_aspect;
cameras[i].ppx *= compose_work_aspect;
cameras[i].ppy *= compose_work_aspect;
Size sz = full_img_sizes[i];
if (std::abs(compose_scale - 1) > 1e-1)
{
sz.width = cvRound(full_img_sizes[i].width * compose_scale);
sz.height = cvRound(full_img_sizes[i].height * compose_scale);
}
Mat K;
cameras[i].K().convertTo(K, CV_32F);
Rect roi = warper->warpRoi(sz, K, cameras[i].R);
corners[i] = roi.tl();
sizes[i] = roi.size();
}
}
if (abs(compose_scale - 1) > 1e-1)
resize(full_img, img, Size(), compose_scale, compose_scale, INTER_LINEAR_EXACT);
else
img = full_img;
full_img.release();
Size img_size = img.size();
Mat K, R;
cameras[img_idx].K().convertTo(K, CV_32F);
R = cameras[img_idx].R;
warper->warp(img, K, cameras[img_idx].R, INTER_LINEAR, BORDER_REFLECT, img_warped);
mask.create(img_size, CV_8U);
mask.setTo(Scalar::all(255));
warper->warp(mask, K, cameras[img_idx].R, INTER_NEAREST, BORDER_CONSTANT, mask_warped);
compensator->apply(img_idx, corners[img_idx], img_warped, mask_warped);
img_warped.convertTo(img_warped_s, CV_16S);
img_warped.release();
img.release();
mask.release();
dilate(masks_warped[img_idx], dilated_mask, Mat());
resize(dilated_mask, seam_mask, mask_warped.size(), 0, 0, INTER_LINEAR_EXACT);
mask_warped = seam_mask & mask_warped;
if (!blender)
{
blender = Blender::createDefault(Blender::MULTI_BAND, false);
Size dst_sz = resultRoi(corners, sizes).size();
float blend_width = sqrt(static_cast<float>(dst_sz.area())) * blend_strength / 100.f;
if (blend_width < 1.f){
blender = Blender::createDefault(Blender::NO, false);
}
else
{
MultiBandBlender* mb = dynamic_cast<MultiBandBlender*>(blender.get());
mb->setNumBands(static_cast<int>(ceil(log(blend_width) / log(2.)) - 1.));
}
blender->prepare(corners, sizes);
}
blender->feed(img_warped_s, mask_warped, corners[img_idx]);
}
std::cout << "\nBlending ...\n";
Mat result, result_mask;
blender->blend(result, result_mask);
imwrite("result.png", result);
imwrite("result_mask.png", result_mask);
std::cout << "\nWarp each center point, and draw solid circle.\n";
std::vector<cv::Scalar> colors = { {255,0,0}, {0, 255, 0}, {0, 0, 255} };
for (int idx = 0; idx < img_names.size(); ++idx) {
img = cv::imread(img_names[idx]);
Mat K;
cameras[idx].K().convertTo(K, CV_32F);
Mat R = cameras[idx].R;
cv::Point2f cpt = cv::Point2f(img.cols / 2, img.rows / 2);
cv::Point pt = calcWarpedPoint(cpt, K, R, warper, corners, sizes);
cv::circle(result, pt, 5, colors[idx], -1, cv::LINE_AA);
std::cout << cpt << " => " << pt << std::endl;
}
std::cout << "\nCheck `result.png`, `result_mask.png` and `result2.png`!\n";
imwrite("result2.png", result);
std::cout << "\nDone!\n";
return 0;
}
以下是一些有用的链接:
stitching_detailed.cpp:https://github.com/opencv/opencv/blob/4.0.1/samples/cpp/stitching_detailed.cpp
waper->warp(),warpPoint(),warpRoi()https://github.com/opencv/opencv/blob/master/modules/stitching/src/warpers.cpp#L153
resultRoi()https://github.com/opencv/opencv/blob/master/modules/stitching/src/util.cpp#L116
其他可能有趣的链接:
将opencv remap代码从c++转换为python
在扫描文档中拆分文本行
如何使用Flann匹配之间的关系确定合理的单应性?
{kind=link}
{kind=link}
{kind=link}
buildMaps然后xmap,ymap的示例?你认为变量result_mask有什么作用? - Paleo