这是一个老问题,但我已经解决了这个问题(C++)。
https://github.com/feelinfine/tracer
也许对某些人有用。
(抱歉我的英语不好)
单行跟踪
template <typename PointType>
std::set<V2i> trace_line(const PointType& _start_point, const PointType& _end_point, size_t _cell_size)
{
auto point_to_grid_fnc = [_cell_size](const auto& _point)
{
return V2i(std::floor((double)_point.x / _cell_size), std::floor((double)_point.y / _cell_size));
};
V2i start_cell = point_to_grid_fnc(_start_point);
V2i last_cell = point_to_grid_fnc(_end_point);
PointType direction = _end_point - _start_point;
int step_x = (direction.x >= 0) ? 1 : -1;
int step_y = (direction.y >= 0) ? 1 : -1;
double hypot = std::hypot(direction.x, direction.y);
V2d norm_direction(direction.x / hypot, direction.y / hypot);
double near_x = (step_x >= 0) ? (start_cell.x + 1)*_cell_size - _start_point.x : _start_point.x - (start_cell.x*_cell_size);
double near_y = (step_y >= 0) ? (start_cell.y + 1)*_cell_size - _start_point.y : _start_point.y - (start_cell.y*_cell_size);
double ray_step_to_vside = (norm_direction.x != 0) ? near_x / norm_direction.x : std::numeric_limits<double>::max();
double ray_step_to_hside = (norm_direction.y != 0) ? near_y / norm_direction.y : std::numeric_limits<double>::max();
double dx = (norm_direction.x != 0) ? _cell_size / norm_direction.x : std::numeric_limits<double>::max();
double dy = (norm_direction.y != 0) ? _cell_size / norm_direction.y : std::numeric_limits<double>::max();
std::set<V2i> cells;
cells.insert(start_cell);
V2i current_cell = start_cell;
size_t grid_bound_x = std::abs(last_cell.x - start_cell.x);
size_t grid_bound_y = std::abs(last_cell.y - start_cell.y);
size_t counter = 0;
while (counter != (grid_bound_x + grid_bound_y))
{
if (std::abs(ray_step_to_vside) < std::abs(ray_step_to_hside))
{
ray_step_to_vside = ray_step_to_vside + dx;
current_cell.x = current_cell.x + step_x;
}
else
{
ray_step_to_hside = ray_step_to_hside + dy;
current_cell.y = current_cell.y + step_y;
}
++counter;
cells.insert(current_cell);
};
return cells;
}
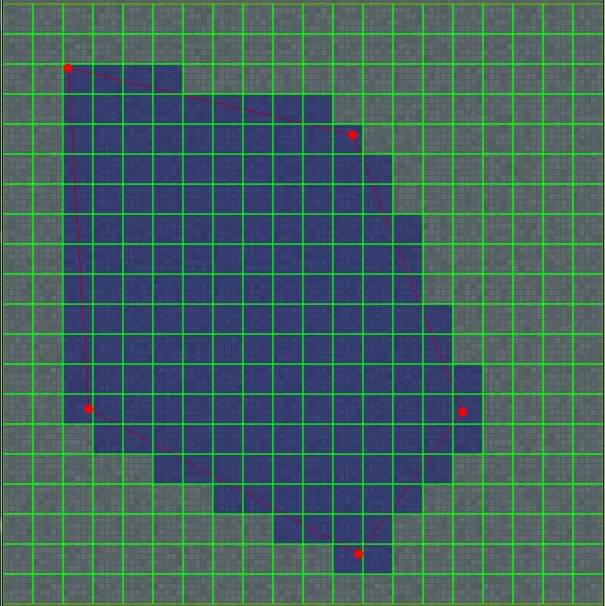
获取所有单元格
template <typename Container>
std::set<V2i> pick_cells(Container&& _points, size_t _cell_size)
{
if (_points.size() < 2 || _cell_size <= 0)
return std::set<V2i>();
Container points = std::forward<Container>(_points);
auto add_to_set = [](auto& _set, const auto& _to_append)
{
_set.insert(std::cbegin(_to_append), std::cend(_to_append));
};
std::set<V2i> cells;
std::vector<std::future<std::set<V2i> > > results;
using PointType = decltype(points.cbegin())::value_type;
for (auto it = points.cbegin(); it != std::prev(points.cend()); ++it)
results.push_back(std::async(trace_line<PointType>, *it, *std::next(it), _cell_size));
results.push_back(std::async(trace_line<PointType>, points.back(), points.front(), _cell_size));
for (auto& it : results)
add_to_set(cells, it.get());
std::set<V2i> to_add;
int last_x = cells.begin()->x;
int counter = cells.begin()->y;
for (auto& it : cells)
{
if (last_x != it.x)
{
counter = it.y;
last_x = it.x;
}
if (it.y > counter)
{
for (int i = counter; i < it.y; ++i)
to_add.insert(V2i(it.x, i));
}
++counter;
}
add_to_set(cells, to_add);
return cells;
}
类型
template <typename _T>
struct V2
{
_T x, y;
V2(_T _x = 0, _T _y = 0) : x(_x), y(_y)
{
};
V2 operator-(const V2& _rhs) const
{
return V2(x - _rhs.x, y - _rhs.y);
}
bool operator==(const V2& _rhs) const
{
return (x == _rhs.x) && (y == _rhs.y);
}
bool operator<(const V2& _rhs) const
{
return (x == _rhs.x) ? (y < _rhs.y) : (x < _rhs.x);
}
};
using V2d = V2<double>;
using V2i = V2<int>;
使用方法
std::vector<V2d> points = { {200, 200}, {400, 400}, {500,100} };
size_t cell_size = 30;
auto cells = pick_cells(points, cell_size);
for (auto& it : cells)
...