在图论的背景下,“边的松弛”是什么意思?我在学习狄克斯特拉(Dijkstra)算法以寻找单一源最短路径时遇到了这个问题。
8个回答
56
这里有一个描述算法并解释松弛概念的好文章。
“松弛”这个概念来源于将最短路径的估计值与弹簧的长度进行类比。弹簧一般不用于压缩,因此最短路径的代价最开始是一个高估值,就像拉开的弹簧一样。随着发现更短的路径,估价会逐渐降低,弹簧会逐渐松弛。当最短路径被找到时,如果存在的话,弹簧已经松弛到其原始长度。
- krjampani
2
2有没有理由说EDGE是松弛的,而不是节点v的路径。为什么是“EDGE”松弛而不是“PATH”松弛? - user3245268
4这个解释没有多大意义。弹簧就是边吗?那么当一个弹簧放松时其他弹簧会发生什么?为什么它们不是一开始就全部放松?或者这些弹簧就是最短路径吗?那么它们不能被压缩到什么程度以下?为什么要说“放松弹簧”而不是“缩短绳子”?我听说“放松”这个词来自于运筹学,但我还无法找出具体细节... - Alexey
33
Dijkstra算法中的松弛过程指的是如果通过顶点v的路径可以改进与v相连的所有顶点的代价,那么就更新这些顶点的代价。
- digitalvision
1
1这并没有回答问题,问题是关于放松边缘意味着什么。 - user1142217
12
放松一条边(这个概念也可以在其他最短路径算法中找到)是尝试通过使用另一个顶点来降低到达一个顶点的代价。
您正在计算从起始顶点(比如S)到所有其他顶点的距离。在某些时候,您会有中间结果——当前估计值。放松是一个过程,在这个过程中,您检查某些顶点u和v:
if directly_connected(v, u)
if est(S, v) > est(S, u) + dist(u,v)
est(S, v) = est(S, u) + dist(u, v)
其中est(S,a)表示当前的距离估计值,dist(a,b)表示在图中相邻的两个顶点a和b之间的距离。
在松弛过程中,您要检查的基本上是从a到b的当前估计是否可以通过“改变路径”通过c来改进(这种“改变路径”的长度将是从a到c,再从c到b的路径长度)。
- penelope
3
边缘松弛过程
初始化
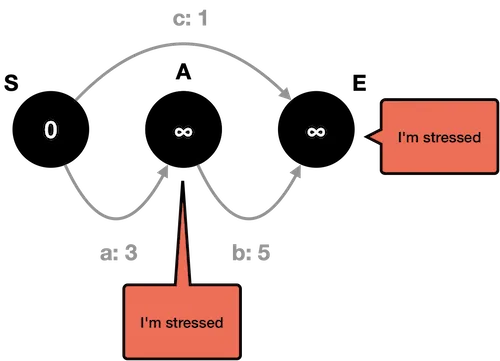
在最短路径算法中,高成本告诉算法“不要走那条路”。因此,默认情况下,我们只知道起始节点是最短路径的一部分,而所有其他节点仍未确定。因此,我们将起始节点(例如S)的成本设为零,将每个其他节点(例如A,E)的成本设为无穷大。
S := new Node()
A := new Node()
E := new Node()
// low cost
S.edge_cost = 0
// high cost
A.edge_cost = 1000 // "infinity"
E.edge_cost = 1000 // "infinity"
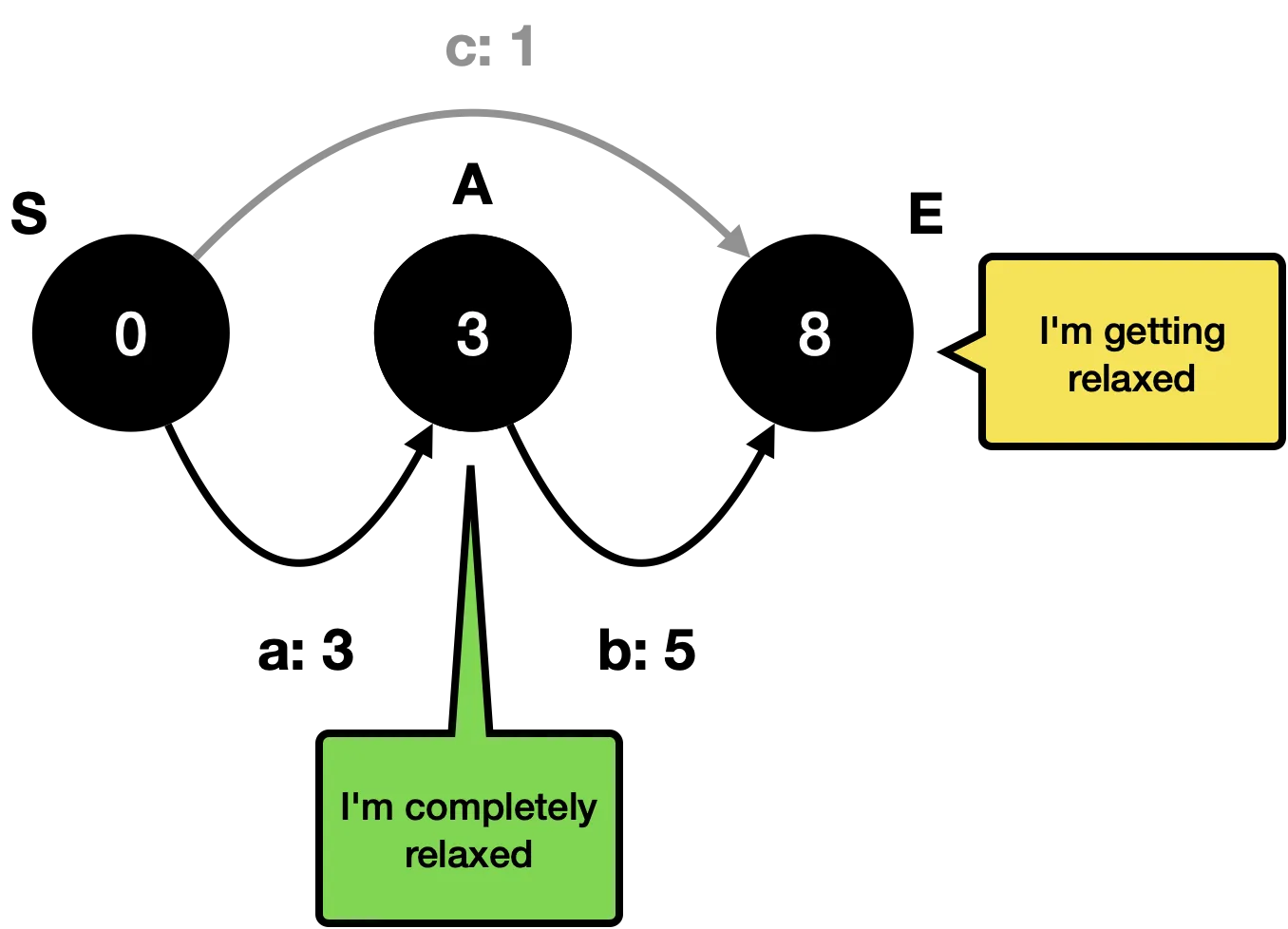
放松
高成本只是暂时的,现在我们需要“放松”降低成本。为此,我们使用边缘成本(例如a、b和c),并在节点较低时更新它们。
// Check if S node can be reduced
// SS := S.edge_cost + S.edge_cost // 0 + 0 = 0
// if (S.edge_cost > SS) { // 0 > 0 => false
// S.edge_cost = SS
// }
// Check if A node can be reduced
SA := S.edge_cost + a // 0 + 3 = 3
if (A.edge_cost > SA) { // 1000 > 3 => true
A.edge_cost = SA // 3
}
// Check if E node can be reduced
AE := A.edge_cost + b // 3 + 5 = 8
if (E.edge_cost > AE) { // 1000 > 8 => true
E.edge_cost = AE // 8
}
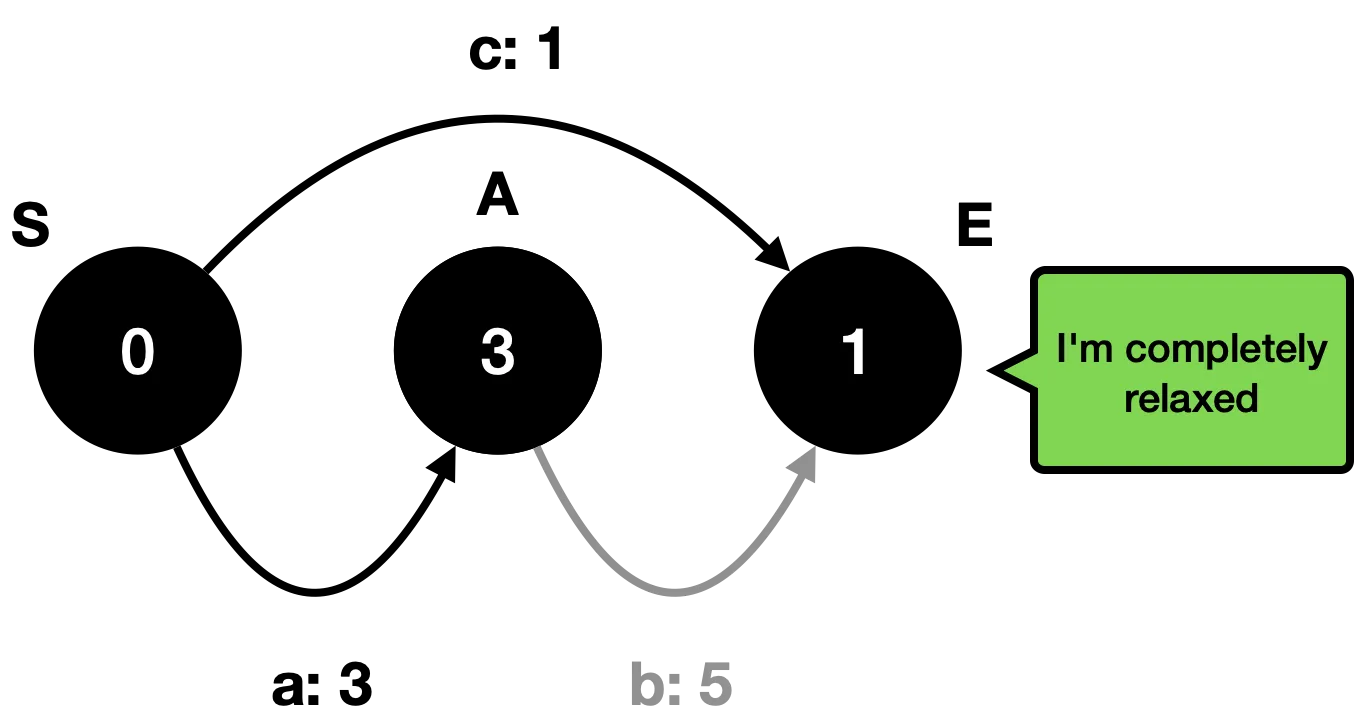
放松重复
// Note: The nodes hold memory,
// so the `edge_cost` remembers the previous cost,
// and that's what the edge is compared against
SE := S.edge_cost + c // 0 + 1 = 1
if (E.edge_cost > SE) { // 8 > 1 => true
E.edge_cost = SE // 1
}
- tim-montague
2
这似乎是在定义松弛顶点的含义,但它并没有定义松弛边的含义。 - user1142217
@user1142217 - 边缘是SA,SE和AE。随着顶点A和E从无穷远处放松,边缘也会放松。 - tim-montague
1
我还不能发表评论,但我想试着回答接受答案的评论。
用户3245268发表评论:
为什么要说EDGE是松弛的,而不是到节点v的路径。为什么是“EDGE”松弛而不是“PATH”松弛?
通常之所以松弛边缘而不是路径,可能是因为在执行Dijkstra算法期间,没有任何路径的显式表示;此时您拥有的只是每个节点的前任指针。
显然,如果松弛边缘,则隐含的新最短路径也会被松弛,因此这并不违反松弛路径的类比。但是在算法中,当您尚未真正考虑路径时,在路径上放松一条边的概念在上下文中同样有意义。
Alexey发表评论:
这种解释几乎没有意义。弹簧是边缘吗?那么当一个弹簧松弛时,其他弹簧会发生什么情况?为什么它们不是从一开始就放松的?或者弹簧是最短路径吗?那么它们在什么范围内是不可压缩的?为什么要谈论“放松弹簧”而不是“缩短绳子”?我听说“放松”来自运筹学,但我还无法弄清楚细节...
是的,弹簧就是边缘。
当一个弹簧被放松时,子图的某些部分中的一些“张力”可能会释放,因此其他一些弹簧也可能会放松。
在开始时,从起始节点到任何其他节点的(初步)最短距离被初始化为无穷大,因此所有弹簧都被拉伸到无穷远。
弹簧应该是“不可压缩[超出其静止状态]”,但我认为这相当令人困惑,而图的另一种模型“绳索模型”则更容易理解。绳索可以
- 拉伸到其适当长度 - 在它们尚未被探索时过度拉伸 - 当它们不是任何最短路径的一部分时,只是悬挂着
在放松边缘时,“新最短路径”的边缘从过度拉伸到刚好拉伸,而“旧最短路径”的边缘从拉伸到松弛。
用户3245268发表评论:
为什么要说EDGE是松弛的,而不是到节点v的路径。为什么是“EDGE”松弛而不是“PATH”松弛?
通常之所以松弛边缘而不是路径,可能是因为在执行Dijkstra算法期间,没有任何路径的显式表示;此时您拥有的只是每个节点的前任指针。
显然,如果松弛边缘,则隐含的新最短路径也会被松弛,因此这并不违反松弛路径的类比。但是在算法中,当您尚未真正考虑路径时,在路径上放松一条边的概念在上下文中同样有意义。
Alexey发表评论:
这种解释几乎没有意义。弹簧是边缘吗?那么当一个弹簧松弛时,其他弹簧会发生什么情况?为什么它们不是从一开始就放松的?或者弹簧是最短路径吗?那么它们在什么范围内是不可压缩的?为什么要谈论“放松弹簧”而不是“缩短绳子”?我听说“放松”来自运筹学,但我还无法弄清楚细节...
是的,弹簧就是边缘。
当一个弹簧被放松时,子图的某些部分中的一些“张力”可能会释放,因此其他一些弹簧也可能会放松。
在开始时,从起始节点到任何其他节点的(初步)最短距离被初始化为无穷大,因此所有弹簧都被拉伸到无穷远。
弹簧应该是“不可压缩[超出其静止状态]”,但我认为这相当令人困惑,而图的另一种模型“绳索模型”则更容易理解。绳索可以
- 拉伸到其适当长度 - 在它们尚未被探索时过度拉伸 - 当它们不是任何最短路径的一部分时,只是悬挂着
在放松边缘时,“新最短路径”的边缘从过度拉伸到刚好拉伸,而“旧最短路径”的边缘从拉伸到松弛。
- bigrob
0
假设在图中,如果(u,v)∈E且w(u,v)=10,则如果在它们之间添加第三个顶点,如w(u,y)=1和w(y,v)=3,现在我们找到了一条权重为1+3=4<10的u和v之间的路径。现在我们将考虑第二条路径(u,y,v)为最短路径,并忽略第一条路径,这就是松弛操作。
- siddique
0
看一下https://www.youtube.com/watch?v=2E7MmKv0Y24&t=1336s 时间:28:30。有趣的是最短路径却处于紧张状态,这对我来说正好相反于“放松”。嗯,算了。
- user825628
0
边缘松弛。
放松从 v -> w 的边缘意味着测试从 s 到 w 的最佳已知方式是否是从 s 到 v,然后取 v 到 w 的边缘,如果是,则更新我们的数据结构。
Java 代码:
private void relax(DirectedEdge e) {
int v = e.from(), w = e.to;
if (distTo[w] > distTo[v] + e.weight()) {
distTo[w] = distTo[v] + e.weight();
edgeTo[w] = e;
}
}
还有顶点松弛。这意味着放松从给定顶点指向的所有边。
private void relax(EdgeWeightedGraph G, int v) {
for (DirectedEdge e : G.adj(v)) {
relax(e);
}
}
- GraceMeng
1
1这并不是特别清晰,但至少与之前的答案不同,它试图回答有关放松边缘意味着什么的问题。 - user1142217
网页内容由stack overflow 提供, 点击上面的可以查看英文原文,
原文链接
原文链接